Вы, наверное, не знаете как сильно я ценю
Хабр. Это не просто сайт с релевантной информацией. Это сообщество людей, нетворкинг. В этом посте краткая история о том, как
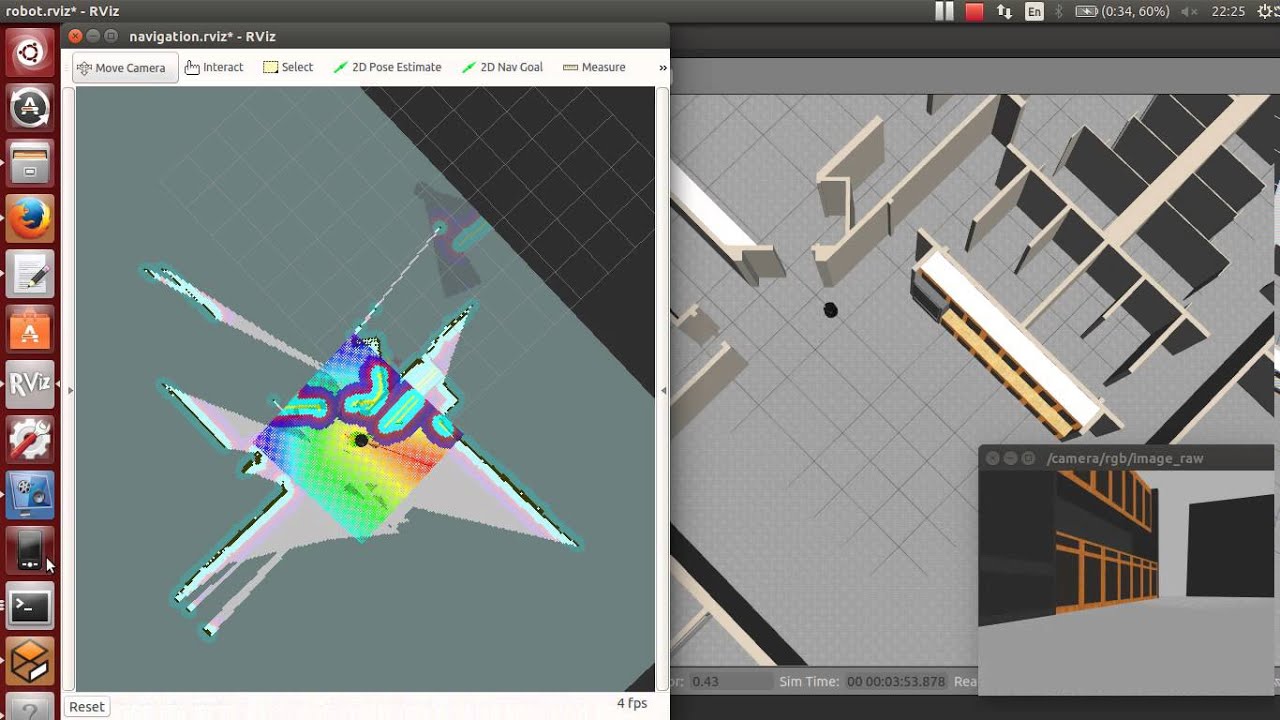
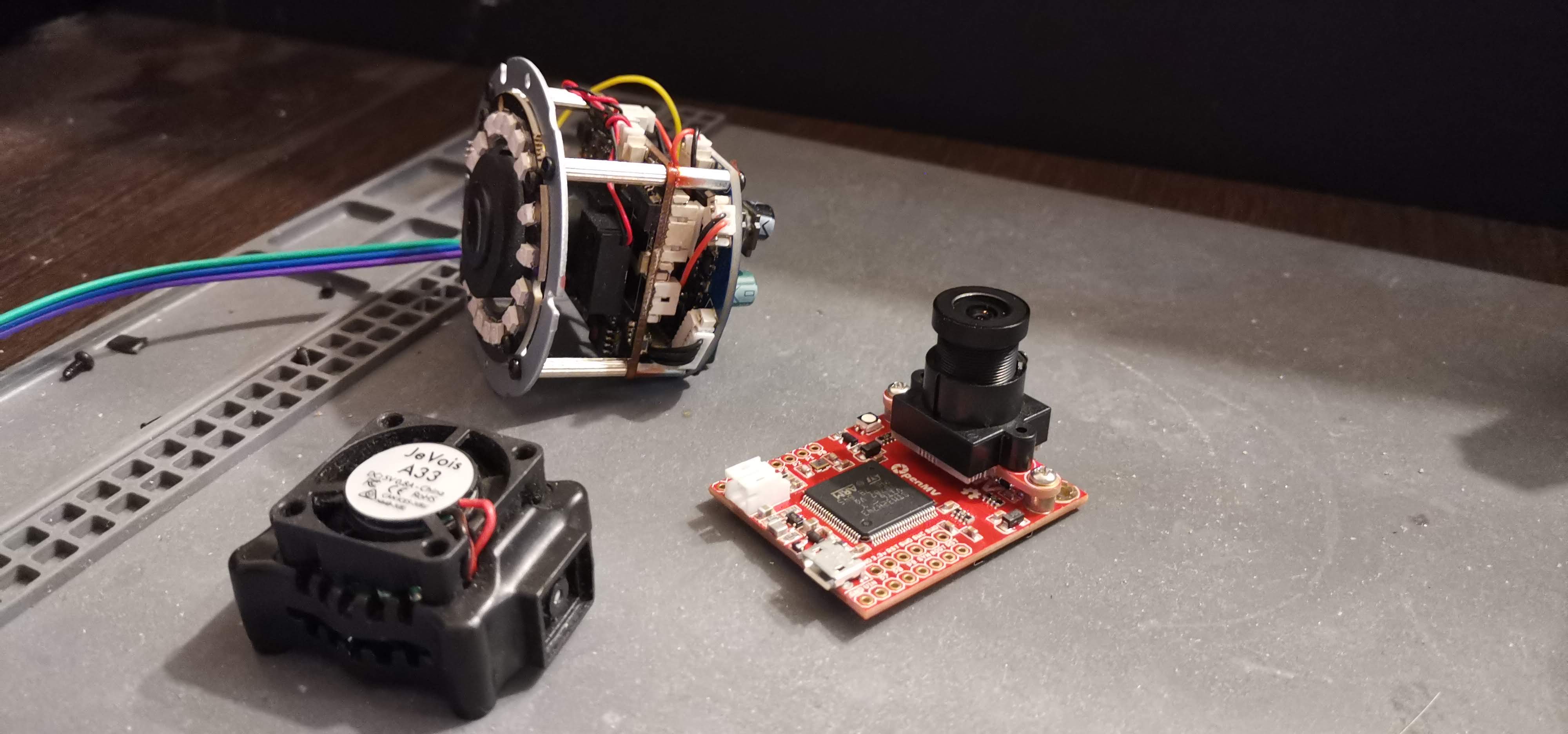
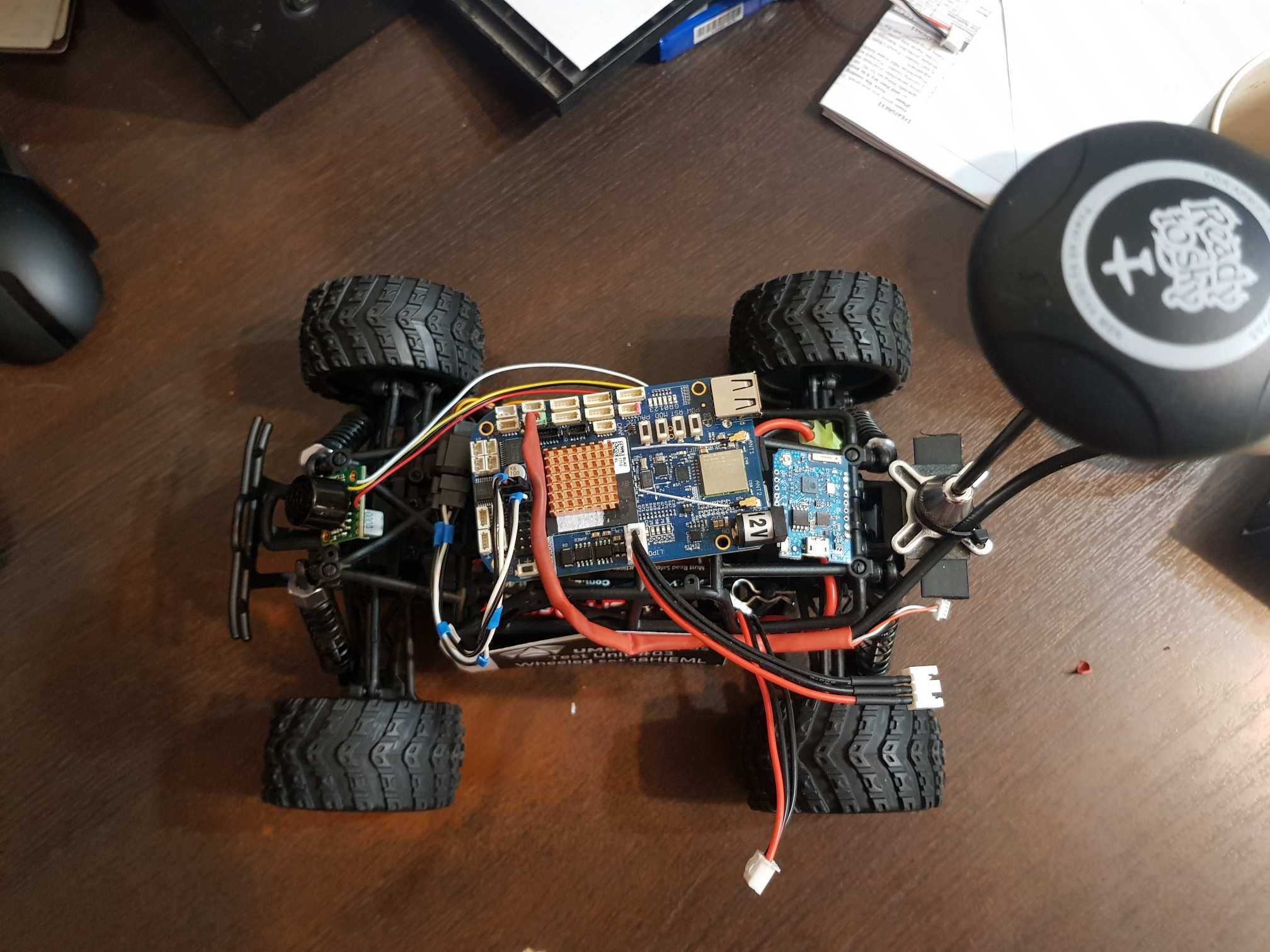
Habr исполняет мечты. Как за 6 месяцев из идеи можно сделать MVP, найти инвесторов и создать что-то новое. Пост о том, что не стоит бояться реализовывать идеи, не оставлять их пылиться до лучших времен. Под катом много фото с питча, с поездки в Доминикану, метаморфозы робота благодаря хабранетворкингу.
Возможно, наша история мотивирует Вас реализовать свои идеи, которые давно вынашивали, но не осмелились превратить в жизнь. Для этого в статье
контакты инвест-фондов в РФ.
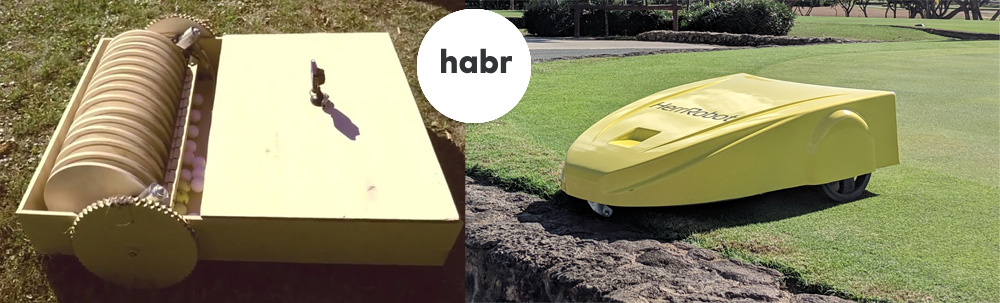
В гольфе есть driving range, это тренировочное поле для отработки дальних и средних ударов. В день на нем может оказаться до 20.000 мячей. Эти мячи нужно как-то собирать. Обычно для сбора используют спецтехнику, прикрепленную к автомобилю. Это расходы на персонал, обслуживание техники, повреждение мячей техникой, повреждение поля.