С каждым годом роботы всё больше проникают в различные сферы человеческой деятельности. Ведь по сравнению с компьютерами и мобильными устройствами в робота можно заложить больше интерактивных, мобильных и социальных функций. Например, домашний робот помимо прочтения почты, напоминания о ближайших встречах и организации видеозвонка, сможет убрать вашу квартиру, поднести кружку горячего кофе, покормить собаку или полить цветы.
Сегодня перспективным считается рынок сервисных и персональных роботов, напрямую взаимодействующих с человеком. Современные роботы уже умеют проводить экскурсии в музеях, развлекать публику, рекламировать новые товары, консультировать клиентов, охранять территории, обслуживать пожилых людей, доставлять почту. В ближайшем будущем, по мере развития искусственного интеллекта, популяризации роботов и удешевления их производства, они станут хорошими друзьями и помощниками для каждого человека.
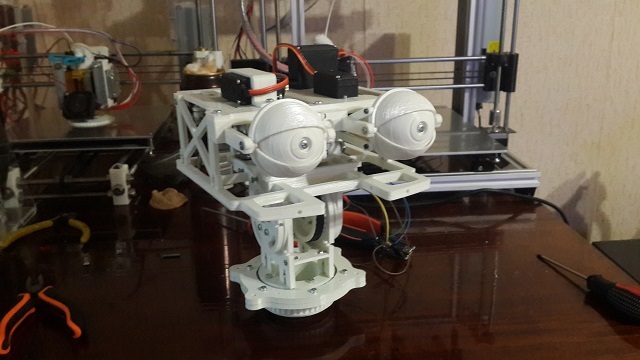
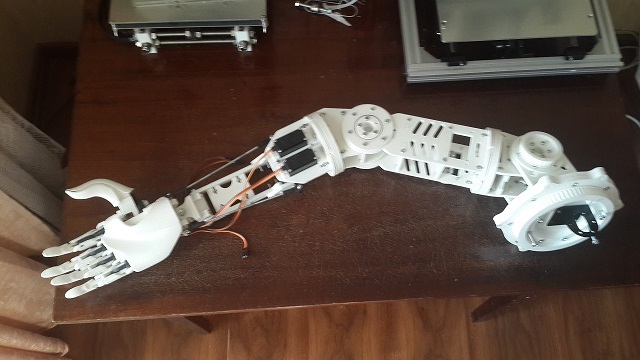
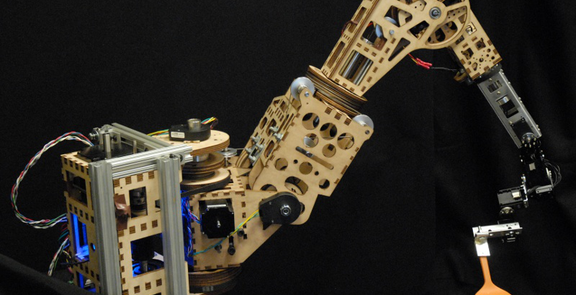
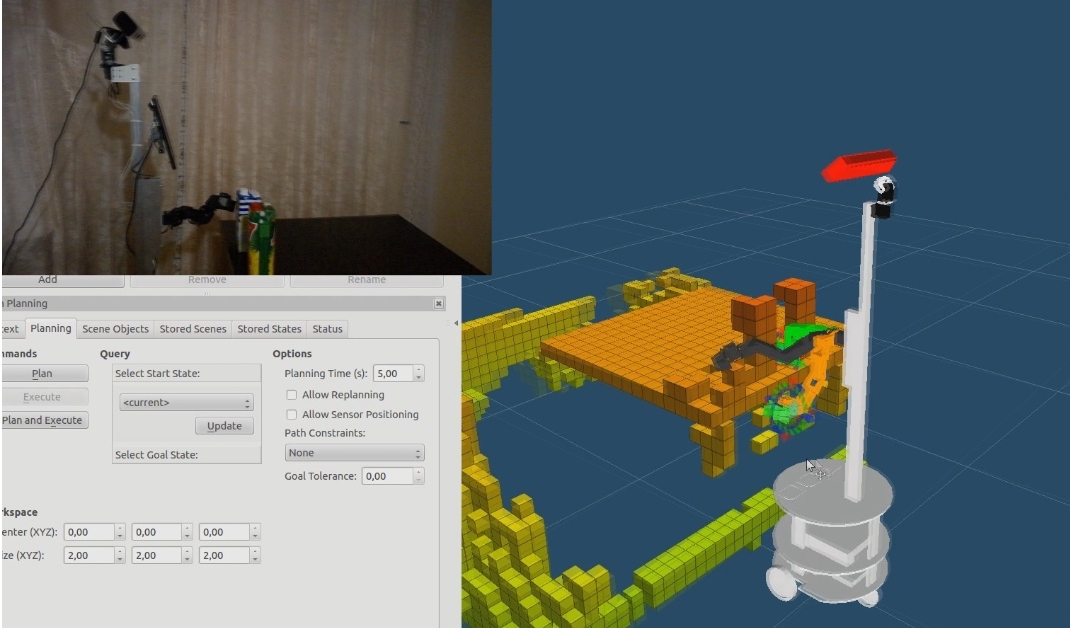
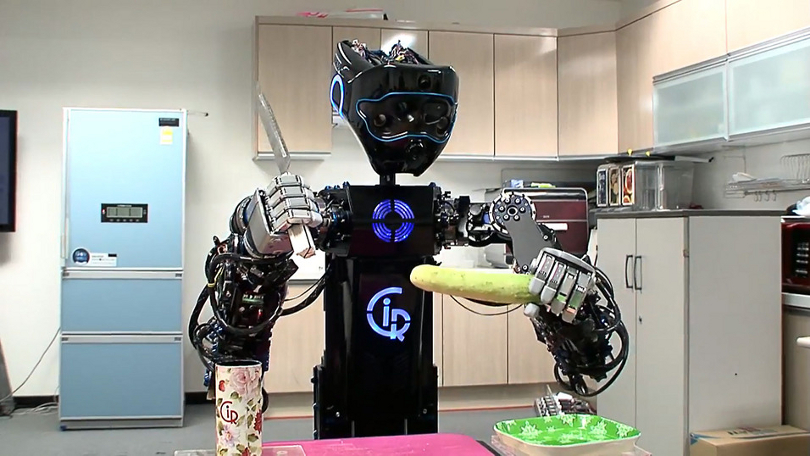
Мы — команда, занимающаяся разработкой сервисного робота ToD. В серии статей на Хабре мы расскажем о ходе нашей работы, о внутреннем устройстве робота и его возможностях. Шаг за шагом, вы увидите как обычная платформа на колесах будет превращаться в настоящего робота, оснащенного руками-манипуляторами, дальномерами, камерой Kinect, интерактивными экранами, и поддерживающего функции автономной навигации, голосового управления, телеприсуствия и распознания лиц и объектов.
В рамках первой вводной статьи мы попробуем ответить на вопрос о том, какими функциями должен обладать сервисный робот? Рассмотрим некоторые сферы применения таких роботов и ряд интересных моделей, представленных на рынке.