Несколько лет назад в России появилась образовательная программа «Робототехника» . Согласно этому официальному сайту она включает в себя 3 основных направления:
ОБЩАЯ РОБОТОТЕХНИКА — мехатроника, робототехника и высокие технологии в системе общего образования и хобби
ПРОФЕССИОНАЛЬНАЯ РОБОТОТЕХНИКА — мехатроника, робототехника, высокие технологии в системе профессионального образования; выявление и продвижение перспективных кадров для высокотехнологичных отраслей
ИННОВАЦИИ И ПРЕДПРИНИМАТЕЛЬСТВО — содействие реализации молодежных инновационных и предпринимательских инициатив, самозанятости молодежи в сфере высоких технологий; создание бизнесов в сфере высоких технологий участниками Программы
Остановлюсь на профессиональной робототехнике. В рамках этого направления проводятся 2 основных вида соревнований:
• Робофест — соревнования мобильных роботов в своих классах, отборочные соревнования для участия в Азиатско-Тихоокеанских робототехнических соревнованиях ABU ROBOCON.
• Робокросс – соревнования беспилотных автомобилей-роботов. О них сегодня и пойдет речь.

Фотография команд участников Робокросс-2011
Робокросс-2010.
По результатам проведения Робофест-2010 командам участникам было подарено 6 автомобилей «Газель-бизнеес» для их переоборудования в беспилотные транспортные средства и вручено приглашение на Робокросс. Соревнования состоялись (впервые в России) 18 июля 2010 года на молодежном инновационном форуме «Селигер 2010. Команды-участники представляли такие ВУЗы как:
• Московский автодорожный институт,
• Ковровскую государственную технологическую академию,
• Саратовский государственный технический университет,
• Рязанский государственный радиотехнический университет,
• Нижегородский автомеханический техникум,
• Нижегородский государственный университет им. Лобачевского.
Один их спонсоров («Техновижн») так же представил для участия свою Газель.
Согласно правилам, автомобили должны были автономно (без участия оператора) выполнить 3 задания:
• проехать по прямой от точки до точки — задание являлось квалификационным заездом
• проехать по п-образной траектории – примерно 100 на 30 метров
• проехать по сложной кривой общей протяженностью около 400м.
Трасса задавалась дорожными конусами, расставленными на трассе. Команды-участники могли заранее пройти трассу и снять координаты узловых точек для своих автомобилей – основной системой навигации являлась ГЛОНАСС/GPS (обязательное условие соревнований) — Геос-1М. Еще одним обязательным условием было наличие системы экстренной остановки (подобно системе E-STOP).
Места распределились следующим образом:
1. Red Eyes (Ковровская государственная технологическая академия), капитаном которой я и являюсь.
2. НАМТ (Нижегородский автомеханический техникум)
3. Аврора (Рязанский государственный радиотехнический университет)
Не обошлось, конечно, и без небольших происшествий – во время настройки и пробных заездов мы сбили небольшую елочку и деревянный транспарант.
человек, бегущий рядом, обеспечивает экстренную остановку с пульта р/у
Робокросс-2011.
Соревнования снова проходили на берегу озера Селигер. На этот раз правила усложнились.
Задания включали в себя не только автономный вариант движения транспортного средства, но и ручной:
• Движение в автономном режиме по прямой и остановка – квалификация.
• Движение в ручном режиме управления – «разведка». Необходимо было приехать в точку с заданными географическими координатами (координаты выдавались за полчаса перед заездом). В этой точке находился предмет, который необходимо было опознать, и передать его изображение.
• Движение в автономном режиме по кривой (так же задаваемой координатами узловых точек), общей протяженностью 500м – «транспортировка».
На трассе находились препятствия, ширина коридора в самых узких местах составляла около 3м (при средней погрешности ГЛОНАСС/GPS приемника в 10м). Движение от точки до точки проходило по произвольной траектории с учетом обьезда препятствий. Оценивались точность и время прохождения трассы. Обнаружение и обьезд препятствий был выполнен у всех по разному — кто-то использовал лазерный сканер (sick) и строил карту местности, кто-то использовал УЗ дальномер (работающий по приницпу: вижу препятствие, начинаю поворачивать до тех пор, пока препятствие не выйдет из зоны движения).
Требования к системам навигации и экстренной остановки не изменились.
На этот раз кроме Газелей участие принимали самодельные транспортные средства и легковые автомобили. Квалификацию смогли пройти 7 странспортных средств.

Транспортное средство, построеное с применением электрических велоколес и системы технического зрения.

Команда Уфимского государственного колледжа радиоэлектроники. К сожалению их автомобиль потерял управление и врезавшись в препятствие выбыл из гонки.
Призовые места совпали с прошлогодними:
1. Red Eyes (Ковровская государственная технологическая академия)
2. НАМТ (Нижегородский автомеханический техникум)
3. Аврора (Рязанский государственный радиотехнический университет)

Команда-победитель Red Eyes
По результатам этих соревнований команда победитель получило права участвовать в европейских соревнованиях беспилотных автомобилей M-ELROB 2012, которые пройдут осенью в Швейцарии. Впервые Россия принимает участие в таких крупных соревнованиях беспилотных автомобилей-роботов.
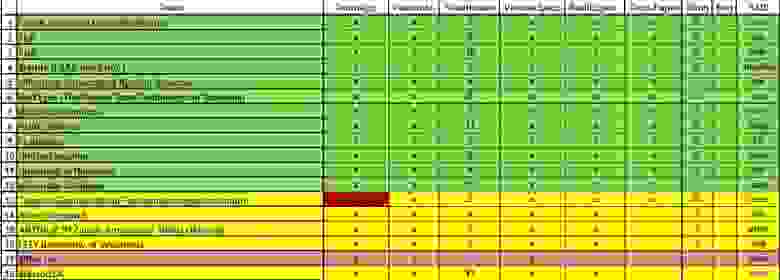
Список участников M-ELROB 2012.
myrobot.ru/news/2011/07/20110711_1.php
myrobot.ru/news/2010/07/20100718_1.php
www.gorodkovrov.ru/blog/Obo_vsem/463.html
redeyes.jcod.ru
robosport.ru (мой антивирус находит на сайте какой-то вредоносный ява скрипт, но думаю эта
проблема вскоре решится)
www.elrob.org
ОБЩАЯ РОБОТОТЕХНИКА — мехатроника, робототехника и высокие технологии в системе общего образования и хобби
ПРОФЕССИОНАЛЬНАЯ РОБОТОТЕХНИКА — мехатроника, робототехника, высокие технологии в системе профессионального образования; выявление и продвижение перспективных кадров для высокотехнологичных отраслей
ИННОВАЦИИ И ПРЕДПРИНИМАТЕЛЬСТВО — содействие реализации молодежных инновационных и предпринимательских инициатив, самозанятости молодежи в сфере высоких технологий; создание бизнесов в сфере высоких технологий участниками Программы
Остановлюсь на профессиональной робототехнике. В рамках этого направления проводятся 2 основных вида соревнований:
• Робофест — соревнования мобильных роботов в своих классах, отборочные соревнования для участия в Азиатско-Тихоокеанских робототехнических соревнованиях ABU ROBOCON.
• Робокросс – соревнования беспилотных автомобилей-роботов. О них сегодня и пойдет речь.

Фотография команд участников Робокросс-2011
Робокросс-2010.
По результатам проведения Робофест-2010 командам участникам было подарено 6 автомобилей «Газель-бизнеес» для их переоборудования в беспилотные транспортные средства и вручено приглашение на Робокросс. Соревнования состоялись (впервые в России) 18 июля 2010 года на молодежном инновационном форуме «Селигер 2010. Команды-участники представляли такие ВУЗы как:
• Московский автодорожный институт,
• Ковровскую государственную технологическую академию,
• Саратовский государственный технический университет,
• Рязанский государственный радиотехнический университет,
• Нижегородский автомеханический техникум,
• Нижегородский государственный университет им. Лобачевского.
Один их спонсоров («Техновижн») так же представил для участия свою Газель.
Согласно правилам, автомобили должны были автономно (без участия оператора) выполнить 3 задания:
• проехать по прямой от точки до точки — задание являлось квалификационным заездом
• проехать по п-образной траектории – примерно 100 на 30 метров
• проехать по сложной кривой общей протяженностью около 400м.
Трасса задавалась дорожными конусами, расставленными на трассе. Команды-участники могли заранее пройти трассу и снять координаты узловых точек для своих автомобилей – основной системой навигации являлась ГЛОНАСС/GPS (обязательное условие соревнований) — Геос-1М. Еще одним обязательным условием было наличие системы экстренной остановки (подобно системе E-STOP).
Места распределились следующим образом:
1. Red Eyes (Ковровская государственная технологическая академия), капитаном которой я и являюсь.
2. НАМТ (Нижегородский автомеханический техникум)
3. Аврора (Рязанский государственный радиотехнический университет)
Не обошлось, конечно, и без небольших происшествий – во время настройки и пробных заездов мы сбили небольшую елочку и деревянный транспарант.
человек, бегущий рядом, обеспечивает экстренную остановку с пульта р/у
Робокросс-2011.
Соревнования снова проходили на берегу озера Селигер. На этот раз правила усложнились.
Задания включали в себя не только автономный вариант движения транспортного средства, но и ручной:
• Движение в автономном режиме по прямой и остановка – квалификация.
• Движение в ручном режиме управления – «разведка». Необходимо было приехать в точку с заданными географическими координатами (координаты выдавались за полчаса перед заездом). В этой точке находился предмет, который необходимо было опознать, и передать его изображение.
• Движение в автономном режиме по кривой (так же задаваемой координатами узловых точек), общей протяженностью 500м – «транспортировка».
На трассе находились препятствия, ширина коридора в самых узких местах составляла около 3м (при средней погрешности ГЛОНАСС/GPS приемника в 10м). Движение от точки до точки проходило по произвольной траектории с учетом обьезда препятствий. Оценивались точность и время прохождения трассы. Обнаружение и обьезд препятствий был выполнен у всех по разному — кто-то использовал лазерный сканер (sick) и строил карту местности, кто-то использовал УЗ дальномер (работающий по приницпу: вижу препятствие, начинаю поворачивать до тех пор, пока препятствие не выйдет из зоны движения).
Требования к системам навигации и экстренной остановки не изменились.
На этот раз кроме Газелей участие принимали самодельные транспортные средства и легковые автомобили. Квалификацию смогли пройти 7 странспортных средств.

Транспортное средство, построеное с применением электрических велоколес и системы технического зрения.

Команда Уфимского государственного колледжа радиоэлектроники. К сожалению их автомобиль потерял управление и врезавшись в препятствие выбыл из гонки.
Призовые места совпали с прошлогодними:
1. Red Eyes (Ковровская государственная технологическая академия)
2. НАМТ (Нижегородский автомеханический техникум)
3. Аврора (Рязанский государственный радиотехнический университет)

Команда-победитель Red Eyes
По результатам этих соревнований команда победитель получило права участвовать в европейских соревнованиях беспилотных автомобилей M-ELROB 2012, которые пройдут осенью в Швейцарии. Впервые Россия принимает участие в таких крупных соревнованиях беспилотных автомобилей-роботов.
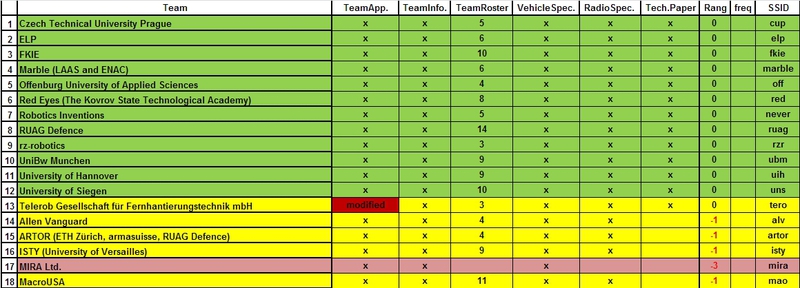
Список участников M-ELROB 2012.
myrobot.ru/news/2011/07/20110711_1.php
myrobot.ru/news/2010/07/20100718_1.php
www.gorodkovrov.ru/blog/Obo_vsem/463.html
redeyes.jcod.ru
robosport.ru (мой антивирус находит на сайте какой-то вредоносный ява скрипт, но думаю эта
проблема вскоре решится)
www.elrob.org







