Компания КРОК, входящая в пятерку крупнейших ИТ-компаний РФ*, открывает приём заявок на конкурс «Летающий робот». Конкурс проводится в рамках проекта «20 способов жить ярче». Главный приз 1000000 рублей
Генеральный информационный партнер – журнал «Популярная механика».
Сайт конкурса: http://www.robots.croc.ru/
На полигоне, представляющем собой открытую «коробку» по типу дворовой хоккейной, будут нанесены метки старта/финиша, расставлены преграды. Задача робота — взлететь из точки старта, успешно миновать препятствие, долететь до точки посадки и сесть в любое место маркера. Затем взлететь, вернуться в точку взлета, успешно миновав препятствие, и сесть.
Важный факт — возможна стабилизация по GPS.
Сесть в точке посадки можно в любое место обозначенного круга (диаметр — 3 метра). На схеме пунктирной линией обозначен примерный маршрут автономного полета.
«Попробуйте свои силы: самостоятельно или в команде до 10 человек. Мы лишь ограничиваем возраст участников (от 18 лет), но не ограничиваем ваши таланты и изобретательность!»
Соревнование пройдет в августе 2013 года, заявки на участие принимаются до 15 ноября 2012 года.
Полностью условия участия
Генеральный информационный партнер – журнал «Популярная механика».
Сайт конкурса: http://www.robots.croc.ru/
Что за задание?
На полигоне, представляющем собой открытую «коробку» по типу дворовой хоккейной, будут нанесены метки старта/финиша, расставлены преграды. Задача робота — взлететь из точки старта, успешно миновать препятствие, долететь до точки посадки и сесть в любое место маркера. Затем взлететь, вернуться в точку взлета, успешно миновав препятствие, и сесть.
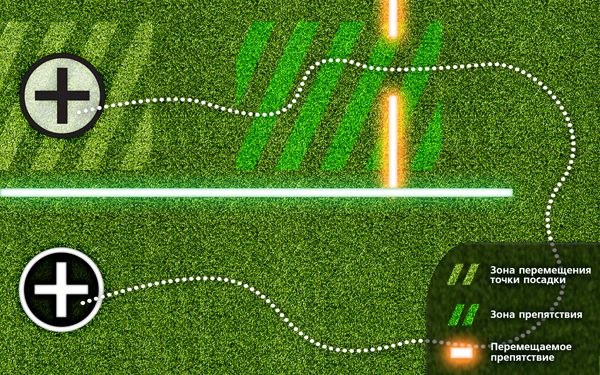
Схема полигона
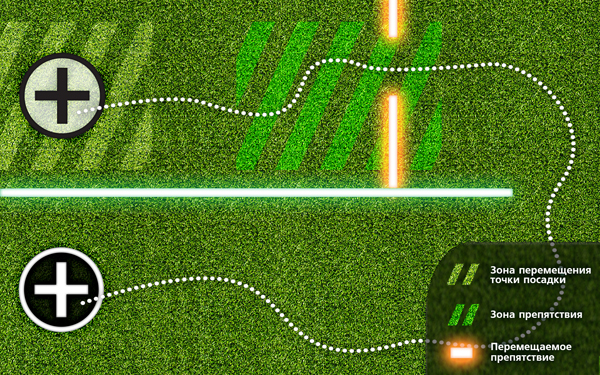
Описание полигона
- Возводится под открытым небом, представляет собой открытую «коробку» по типу дворовой хоккейной площадки.
- Размер коробки — 50 на 25 метров, высота стенок и перегородок внутри периметра -приблизительно 3 метра, перегородки радиопрозрачные.
- Полигон сверху затянут сеткой, препятствующей вылету роботов за его пределы. Разбит на две части перегородкой с проходом шириной не менее 3 метров.
- Точка старта и посадки помечены крестами, имеют инвертированную окраску (белый крест на черном фоне и черный крест на белом), нанесены краской на круг из пластика/фанеры, диаметр круга 3 метра.
- Положение точки посадки изменяется перед каждым полетом, перемещается в случайное место в пределах выделенной для этого зоны (на схеме показана пунктирной линией).
- Отдельно выделена зона препятствия, в пределах которой в случайное место перед каждым полетом устанавливается перегородка, блокирующая две трети ширины «коридора».
Важный факт — возможна стабилизация по GPS.
Задание
- Взлететь из точки старта и долететь до точки посадки, успешно миновав препятствие.
- Снова взлететь, вернувшись в точку старта, опять миновав препятствие.
Сесть в точке посадки можно в любое место обозначенного круга (диаметр — 3 метра). На схеме пунктирной линией обозначен примерный маршрут автономного полета.
Критерий выбора победителя
- Успешное выполнение задания: (аппарат работает!).
- Среди команд, успешно выполнивших задание, победитель определяется по минимальному времени прохождения (совершенство алгоритмов навигации, управления). Засчитывается лучшее время среди удачных попыток (о том, что квалифицируется в качестве удачной попытки, — информация ниже).
Условия
- За сутки до полетов каждой команде дается точный чертеж полигона. Точность — до погрешности лазерного дальномера.
- Полет полностью в автоматическом режиме.
- Разрешается прием телеметрии, а также наличие дистанционного автоматического управления с наземного компьютера. При этом любое прикосновении руками в течение полета к наземным устройствам приводит к зачету попытки как неудачной.
- Перегородки в помещении радиопрозрачные.
- В зоне полета во время выполнения задания не может быть людей.
- Судье должно быть предоставлено средство дистанционного выключения двигателей дрона. Например, ему передается пульт, на один из переключателей которого возложена функция выключения двигателей. Работоспособность данной функции проверяется перед выполнением задания. Судья имеет право (обязан) отключить двигатели в случае неадекватного, по его мнению, поведения дрона, а также, если он создает угрозу любому человеку, находящемуся по какой-то причине в зоне полетов.
- Ни судья, ни организатор не несут никакой ответственности за возможные повреждения дрона, в том числе за незапланированное использование функции дистанционного отключения.
- Участникам дается по несколько попыток. Команды выполняют полеты в порядке жеребьевки по одной попытке по кругу. Количество предоставляемых попыток будет определено после завершения регистрации участников.
- Засчитывается любая удачная попытка, у которой фиксируется время.
- Если в течение 15 минут с начала попытки дрон не взлетел по любой причине, то попытка считается неудачной.
- После отрыва дрона от точки взлета любое отклонение от плана полета (например незапланированная посадка) приводит к зачету попытки как неудачной.
- Столкновение со стенами полигона, перегородками, контакт с сеткой не приводит к незачету попытки, если дрон может продолжить полет. Рекомендуется иметь хоть какую-нибудь защиту для винтов.
- Логика управления БПЛА может быть реализована как на самом аппарате, так и на наземном компьютере, который принимает телеметрию от дрона по радиоканалу и по радиоканалу осуществляет управляющие воздействия.
- Время выполнения задания не ограничено. Но размер помещения позволяет выполнить его за 3–5 минут J.
Дополнительные условия
«Попробуйте свои силы: самостоятельно или в команде до 10 человек. Мы лишь ограничиваем возраст участников (от 18 лет), но не ограничиваем ваши таланты и изобретательность!»
Соревнование пройдет в августе 2013 года, заявки на участие принимаются до 15 ноября 2012 года.
Полностью условия участия







