
Как-то раз позвонил мне один мой друг фотограф и задал очень интересный вопрос: “Что если повесить какую-нибудь фото-мыльницу на радиоуправляемый вертолёт и попробовать как-то снимать этой мыльницой с воздуха?”
А я, помнится, с раннего детства мечтал о радиоуправляемых летательных аппаратах, но жил в так называемой “глубинке”, поэтому дальше детских чертежей в этом деле я не продвинулся тогда. В этот раз с ходу я ответить ничего не смог, но т.к. тема меня вдруг заинтересовала (а кого не заинтересует?), я пообещал разобраться с вопросом и созвониться позже.
С самого начала исследования вопроса я перешёл от обычных вертолётов к квадрокоптерам, а точнее AR.Drone, т.к. им гораздо проще управлять. Но тут выяснилось, что конкретно AR.Drone мог поднять что-то совсем лёгкое, и, соответственно, не сильно качественное. Мы даже подумали тогда об андроид-телефонах, для которых можно было бы написать программу и управлять ей с другого телефона через wi-fi.
Дальнейшие поиски завели меня в дебри DIY-коптеров, которые оказались как минимум на порядок дешевле AR.Drone при схожих характеристиках, а при небольшой переплате позволяли поднимать уже гораздо более интересные вещи, вроде беззеркалок, например.
В итоге, через пару месяцев изучения всего этого мы решили заказать XAircraft x650v8. Кстати, странно, что тогда мы упустили из виду DJI F550 + NAZA, который немного дешевле, и по отзывам гораздо стабильнее.
Но как бы там ни было, с x650 мы провели уже почти год, набрались опыта, шишек, попереломали кучу деталей и, думаю, я мог бы про него довольно много всего рассказать.
Забегая вперёд, сразу предупрежу: если вы собрались снимать с воздуха, или вообще управлять более-менее тяжёлыми коптерами с нагрузкой — сразу думайте про FPV и телеметрию по полной программе. Сэкономите кучу денег, т.к. понимание деталей происходящего в воздухе в данный конкретный момент даёт +100500 к управляемости и, соответственно, позволит с большей вероятностью спасти сошедший с ума коптер, не сломав никаких деталей и не перепугав бабушек падающими с неба НЛО.
Итак, XAircraft X650v8:
- 8 двигателей на 4х осях
- Собственный вес: 1260г
- Максимальная нагрузка: 940г (мы поднимали больше, где-то 1200-1500г)
- Время полёта на 25C 3300mAh — около 10 минут с Canon 1100d + Canon 35mm F2
- Цена: ~$750
В стандартный набор не входят: пульт управления и приёмник для него, батареи и зарядник, крепление для камеры, опциональные компас и gps-приёмник.
Когда посылка будет у Вас, Вы увидите кучу чёрных модненьких коробочек, и миллионом пакетиков с деталями внутри. Всё очень аккуратно упаковано. Все пакетики подписаны. Есть небольшой запас по болтикам.

Тут сразу два совета.
1. Все болтики стоит заменить на обычные крестовые. В комплекте идут шестигранные и я не смог найти ни одного ключа, который не стёрся/сорвался бы после месяца использования. Да и вообще, неудобные они. Вам нужны болты на 2.5мм и 3мм. Штук по 50, чтобы с запасом. Благо, стоят они копейки. Но шестигранные ключи на 1.5мм и 2мм всё равно пригодятся, т.к. там есть очень особенные болты, которые Вы врядли найдёте в магазинах, советую их (ключи) как минимум по паре штук купить сразу.
2. Можно заменить 4 карбоновые трубки с внешним диаметром 10мм. Те, что на ногах — в первую очередь, т.к. этот дурацкий карбон сыпется, крошится и ломается просто на ура и ещё оставляет пренеприятнейшие занозы по любому поводу. В любом сантехническом или слесарном магазине можно найти алюминиевые трубки с таким же диаметром. 2 метра такой трубки стоят около 30 рублей. Отпиливаете куски нужной длины, и Ваш коптер получает +1000 к ударопрочности, особенно в районе ног, на которые он приземляется. Вес у алюминиевых трубок совсем не на много больше карбоновых.
К слову, ещё мы приделали на концы ног поролоновые насадки (на фотографии ниже они обмотаны чёрной изолентой для красоты) и таким образом получили гораздо более мягкую посадку на твёрдые поверхности без лишних подскоков:

Я бы ещё заменил оси, на которых висят двигатели (там 16мм снаружи и 14мм внутри), но не смог найти таких алюминиевых трубок. Зато на ebay можно найти такие карбоновые трубки по запросу “carbon tube 14 16”, стоят гораздо дешевле “официальных” запчастей, разве что их придётся попилить и посверлить.
Вообще, после знакомства с этим коптером во мне выросло просто безумное отвращение к карбону.
Итак, первое впечатление, за исключением вездесущих шестигранников получилось очень положительным. Но потом Китай начал показывать своё истинное лицо.
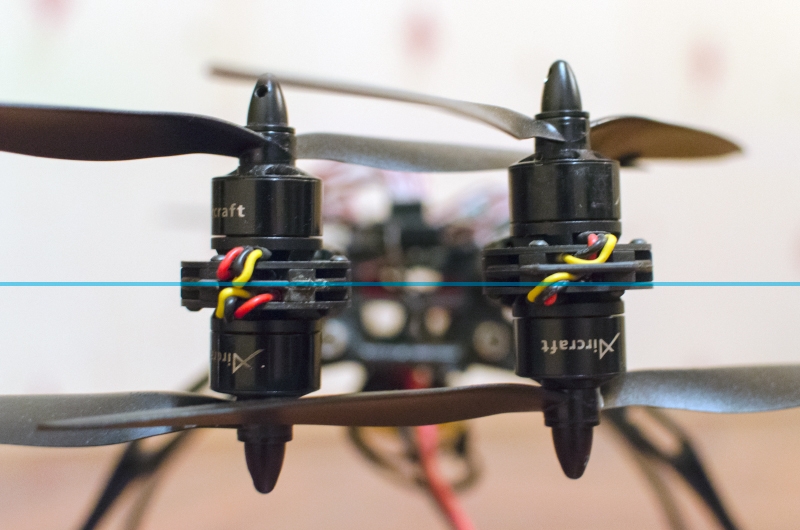
Оси, на которых держатся двигатели, по непонятным причинам никак не получалось установить строго в одной плоскости:
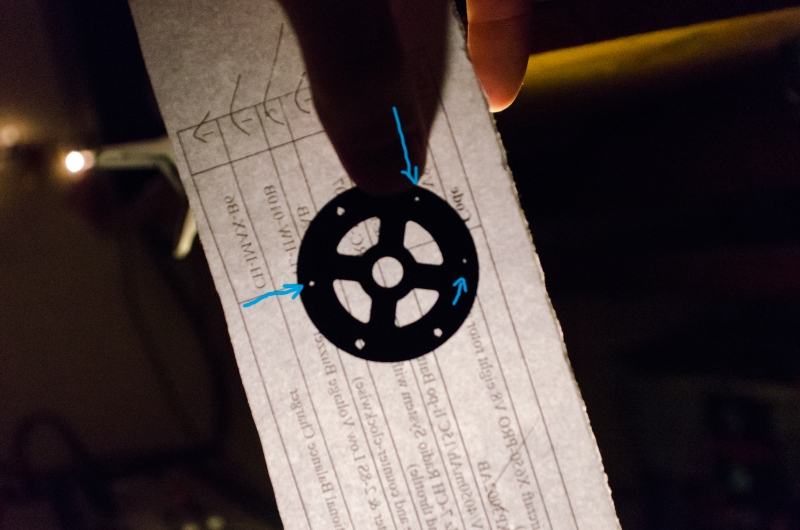
Находились детали с недосверленными дырками:
Так и не получилось установить защитные крышки на держатели регуляторов двигателей (ESC) — все защёлки были успешно сломаны, после чего мы решили просто примотать их чёрной изолентой:

Официальный сайт не работал (заработал в середине лета), но, что забавно, работало обновление в самой программе. Ну и всё в таком духе.
Процесс сборки:

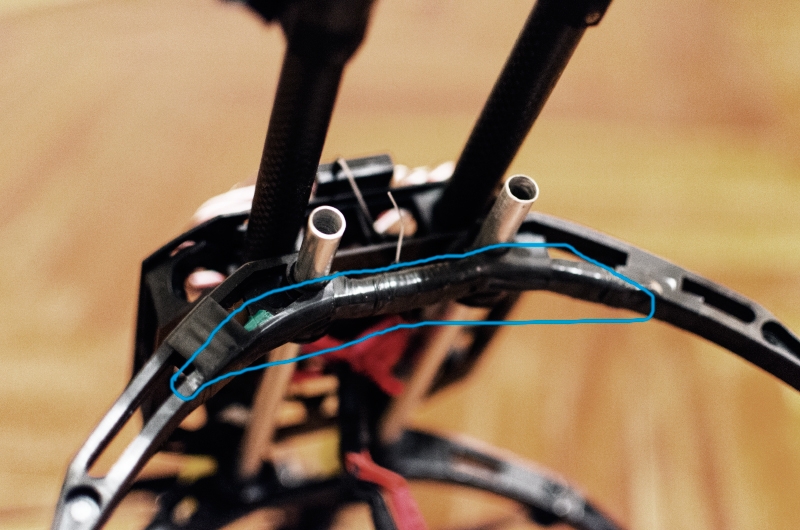
Ещё, у него очень хрупкие ноги. Пока мы учились взлетать и приземляться, сломали парочку. У пришедших на замену сразу же укрепили жестяными полосками вот эти места:
С тех пор их и не меняли.
К счастью, всё это оказалось не на столько критичным, чтобы сломить наш энтузиазм и за пару вечеров вертолёт таки был собран. Но тут мы снова начали натыкаться на странности.
Самая главная странность, которую я так и не смог объяснить — с удержанием горизонтальной позиции. Ситуация такая:
- Гироскопы коптера откалиброваны с ватерпасом.
- Откалиброваны джойстики пульта.
- Опробованы советы найденные на разных форумах про балансировку винтов с помощью кусочков изоленты.
- Опробованы советы про подкладывание всяких штук под “мозги” коптера для изменения его горизонта “хардверно”.
Несмотря на всё это, в пульте приходится настраивать т.н. тримминг примерно на 2-3% вперёд, на 20% наклон вправо и иногда (!) до 30% поворот влево, т.е. мы как бы заставляем пульт всегда посылать состояние джойстиков немного не по нулям. Иначе коптер на месте стоять вообще не будет. А то и перевернётся при взлёте. И как я не пытался, заставить его хотя бы пару секунд просто повисеть в воздухе (без ветра), не трогая джойстики — у меня не получалось. Допускаю, я что-то делал не так.
И ещё, порой я замечал за ним странный глюк: после долгого простоя, при попытке взлететь сразу после включения, коптер пытался перевернуться на бок даже не смотря на тримминг в пульте, описанный выше. Помогало только “выключите и включите его снова”.
В общем, худо-бедно, но к весне мы начали по-немногу летать. Пока к нам ехали дополнительные детальки для управления фотокамерами, мы цепляли к нему всякие мыльницы и беззеркалки, настраивали на них таймаут секунд в 20, быстро взлетали, ждали, опускали и… видели, что опять снято что-то не то.
Потом мы, наконец, разорились на Canon 1100d и старый широкоугольный фикс Vivitar 19mm F3.8 FD, который поначалу оказался весьма неплох. Но потом то ли на нём сказались вибрации, то ли ещё чего, но картинка стала у него совсем мыльная и мы перешли на Canon 35mm F2, имевшийся в запасе.
Примерно к этому времени к нам приехали серво-приводы и мы с помощью изоленты примотали один из них прямо к фотоаппарату над кнопкой спуска:

Особенно весело было это делать, потому, что в этот момент мы находились в переполненной утренней электричке до Выборга. Но конструкция оказалась на удивление надёжной и мы с ней расстались далеко не сразу.
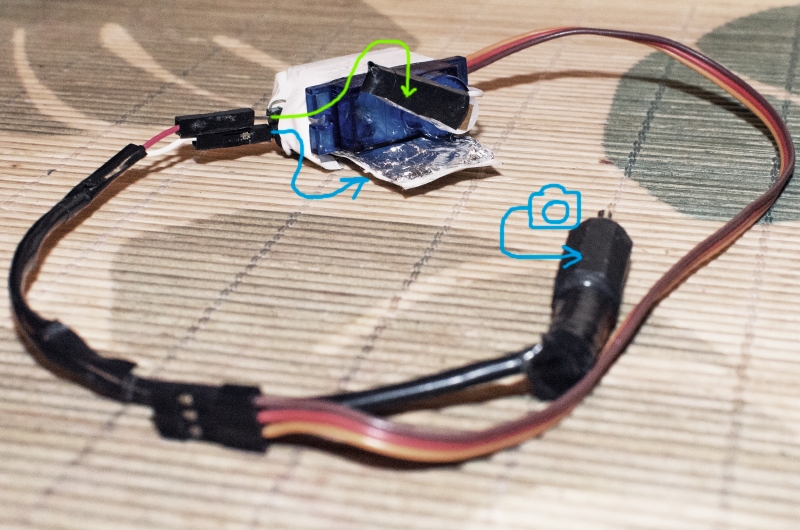
Чуть позже к нам приехала такая штука:
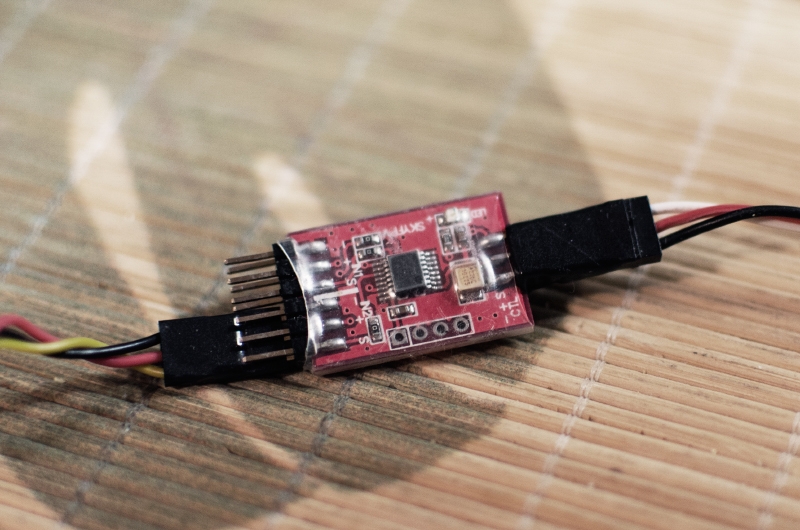
Это реле, предназначенное для переключения сигнала с одного входа на два выхода. Вообще, его паспортное предназначение — менять камеры в системе FPV, но сначала мы его использовали для замыкания контакта спуска у фотоаппарата. Потом уже, когда решили, что без FPV всё совсем не круто, она у нас выполняла своё прямое предназначение, позволяя выбирать сигнал с двух разных камер, а роль замыкалки стал играть первый попавшийся под руку сервопривод в такой вот нехитрой конструкции с использованием фольги:
Тут стоит отойти немного от темы, и рассказать, как шла наша “инженерная” мысль в плане управления камерами.
Изначально почему-то FPV казалось нам слишком сложным и неоправданно дорогим (хотя как выяснилось позже (и не единожды): скупой платит дважды).
Так вот, гугл подсказал нам тогда пару интересных решений для фотографов.
Одним из них был Pixel Expert. Главной прелестью для нас из тех, что обещал произволитель, была возможность просмотра изображения прямо с матрицы фотоаппарата в режиме live-view. Т.е. мы видели бы ровно то, что собирались снять. Паспортных 200 метров по плану нам хватило бы за глаза и вообще всё было бы хорошо, если бы…
Как выяснилось после тестов, растояние уверенного приёма не превышало пары десятков метров, а то и меньше. В добавок, 1100d, несмотря на заявления производителя оказался несовместим в плане live-view. Общение с тех-поддержкой было очень смешным и безумно абсурдным. К счастью, на передатчике Пиксела оказалась встроенная камера, которую мы и использовали первое время. Но опять же, на очень небольших расстояниях. Для страховки на фотоаппарате всё время висел сервопривод, которым я мог нажать на кнопку спуска, в моменты, когда Пиксел терял связь.
Вот так вот выглядел наш коптер с Пикселом на борту:

Решив, что это всё как-то совсем грустно, мы таки заказали почти полный комплект для FPV и ещё один пульт управления с приёмником.
В этот комплект входили:
- 2 камеры (сдохли сами по себе через пару месяцев)
- Приёмник и передатчик на 200mw / 5.8GHz (уверенно работают до сотни метров)
- Пара больших антенн для приёмника и передатчика (оказались хуже стоковых)
Дополнительный пульт управления с приёмником нужны были, чтобы фотограф мог управлять фотоаппаратом сам. В перспективе, кроме кнопки спуска и переключателя FPV-камер было управление наклоняющимся подвесом фотоаппарата, но до начала холодов мы его сделать так и не успели, а покупать готовый — очень дорого, порой как половина коптера. Совершенно не понятно почему.
Экран и очки мы не стали заказывать, потому что решили использовать ноутбук с usb-видеозахватчиком и уже имеющийся Пиксел, у которого на передатчике был аналоговый видео-вход.
В этом случае с Пикселом всё выглядело примерно так:

Но даже тут этот Пиксел нас постоянно подводил. Дело в том, что пульт тоже работает в диапазоне 2.4GHz и как-то так получилось, что их частоты уж слишком совпали — рядом с пультом приёмник Пиксела улавливал сигнал своего передатчика в лучшем случае метрах в двух от него. Но в целом, снимать было можно.
А вот всё, кроме коптера:

Слева на фотографии и справа на ручке фотоаппарата залепленные изолентой камеры.
О процессе.
Как мы себе это представляли:
- Приходим на место
- Выбираем красивые точки съёмки
- Подключаемся, взлетаем, смотрим в Пикселе на то, что видит фотоаппарат
- Как только видим кадр — замираем на месте, делаем снимки
- Спускаемся, проверяем снимки
- Если остались батарейки, GOTO 2
Как это выглядело в реальности:
- Пришли
- Нашли место, где небо не полностью увешано проводами
- Разложились
- Обнаружили, что приёмник Пиксела не видит передатчика
- Нашли положение в котором Пиксел работает
- Настроили фотоаппарат (мы снимали в ручном режиме)
- Взлетели на 10 метров, Пиксел снова начал глючить
- Я держу коптер на месте, товарищ шаманит с Пикселом
- Пиксел побеждён, товарищ говорит куда повернуться и на сколько ещё подняться
- Выполняю указания
- Товарищ говорит: поверни чуть вправо и замри, сейчас буду снимать
- Поворачиваю чуть вправо, пытаюсь держать направление (с высотой не понятно, просто не трогаю джойстик)
- Коптеру плевать, его то несёт дальше вправо, то он поворачивает налево
- Сообщаю товарищу, что в плане удержания делаю всё что могу
- Тот пытается поймать момент и снять
- Болтаемся в воздухе минут пять, пытаясь совладать то ли с ветром, то ли с коптером
- Спускаемся
- Смотрим снимки, на половине горизонт чуть ли не вертикален
- GOTO 7
- На второй раз фотографии, вроде, лучше
- Собираемся
- Если остались батареи, GOTO 2
Тут стоит заметить, что сам коптер в плане мозгов у нас был в минимальной комплектации, т.е. без компаса и GPS, которые на момент заказа продавались только вместе и стоили около 300 долларов.
Компас обещал нам, кроме улучшенной стабилизации, такие фичи как Head Lock и Care Free. Первая — это удержание направления, вторая — возможность поворачивать коптер вокруг своей оси, не меняя направления движения. Казалось бы, две супер-нужные и полезные в нашем случае фичи.
К лету в интернет-магазинах появилась новая версия компаса, да ещё и отдельно от GPS. Не пожалел денег и заказал с самой быстрой доставкой.
Но… первый же полёт с Care Free привёл к сошедшему с ума коптеру, отказавшемуся реагировать на какие-либо сигналы с пульта. Закончилось это, понятное дело, эпической аварией с жертвами в лице одного мотора, 3х пропеллеров, держателя ESC и ещё по мелочи. Могло бы быть лучше, но тестовый полёт был на стадионе и коптер на полной скорости влетел в шатангу ворот, зацепился за неё, и забрался внутрь, запутавшись в сетке. Счёт, к слову, давно уже был не в нашу пользу. От части поэтому к тому моменту мы уже успели запастись запчастями и починка не составила проблем. Но осадочек остался.
Head Lock тоже доверия не вызывал и направление держал даже хуже, чем подруливающий постоянно я сам. Я бы даже сказал, что вообще он его не держал.
В целом, стабильность полётов если и выросла, то незаметно.
После этого всего модуль с GPS решили не заказывать.
Кстати, с большим фотоаппаратом на борту коптер вёл себя куда стабильнее, хотя понятно было, что работает на пределе возможностей. В частности, ветром его уже не так сильно сносило. Чего не скажешь о полётах, например, с GoPro.
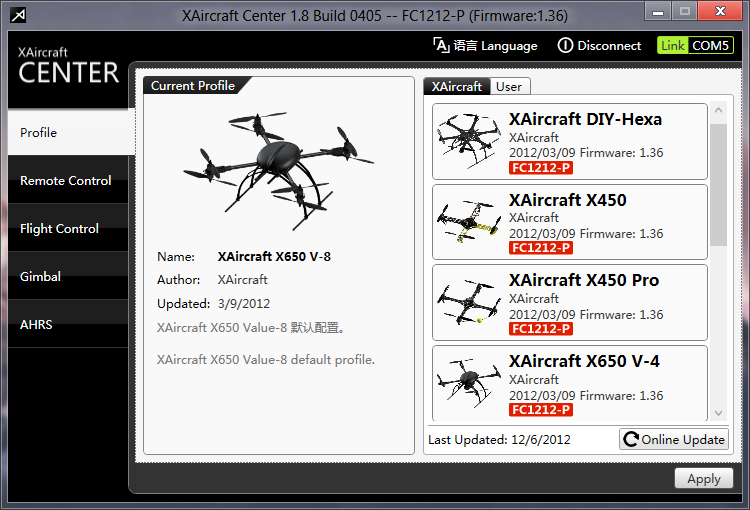
Ещё пара слов о софте, который выглядит на удивление приятно.
После подключения мы можем загрузить в мозги коптера одну из многих моделей, которые обновляются по сети. Есть ещё возможность создать свою, но это совсем хардкор.
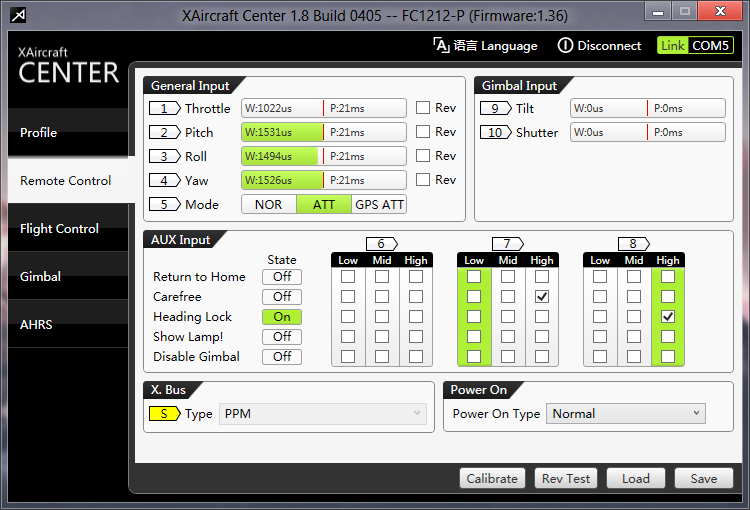
Дальше панель для калибровки джойстиков пульта (их состояние во фрейме General Input) и настройки некоторых переключателей всяких разных фич (Gimbral и AUX Input):
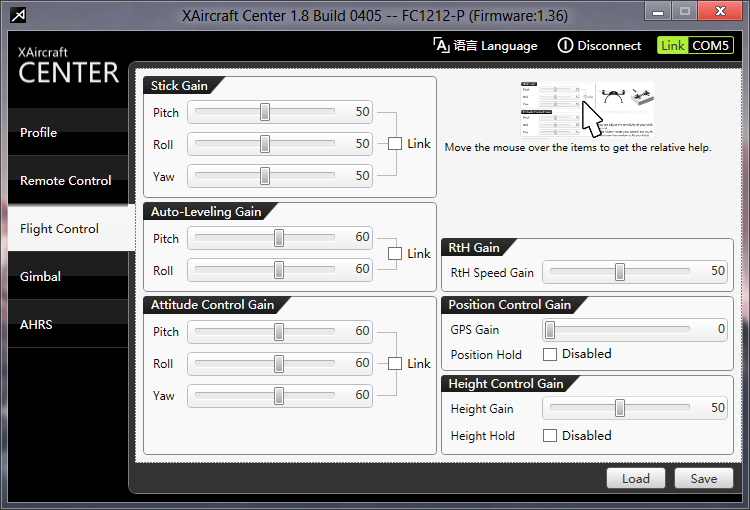
На следующей вкладке мы можем поднастроить поведение коптера:
На вкладке Gimbral — настройки подвеса камеры.
И на последней — калибровка и проверка гироскопов, акселерометров и компаса (на графике видно как я потряс коптер):
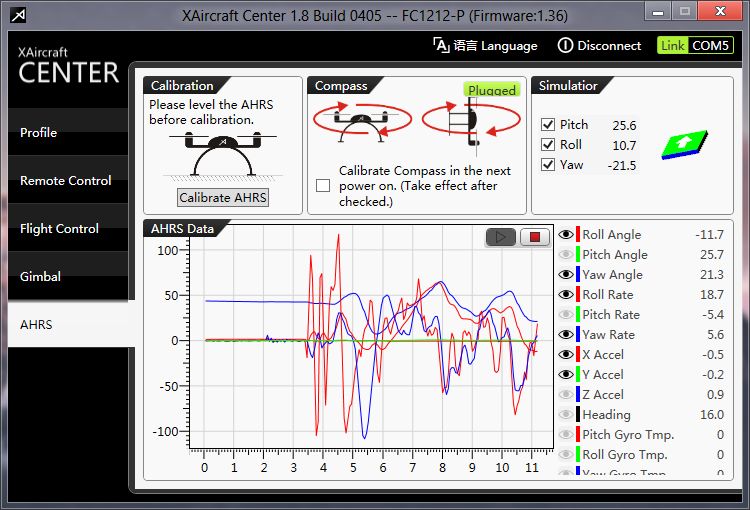
Софт, наверное, оказался самой приятной частью этого коптера, с одним маленьким нюансом. Если отцепить usb-провод, не нажав кнопку Disconnect, то программа зависает намертво — помогает исключительно перезагрузка.
Уже летом, в разгар полётов мы не раз думали о смене платформы на DJI F550 c NAZA. Особенно, после этого видео (внимание на 2:00!).
Но становилось всё холоднее, и после очередной эпической аварии в один очень дурацкий день, мы были совсем демотивированы и решили отложить всё до следующего года, накопить на более мощную модель коптера, полный комплект FPV в двух экемплярах и всё такое.
Сейчас раздумываем между двумя вариантами, равными по цене: DJI S800 + DJI WKM и MK Hexa XL + MK NaviCtrl + MK GPS.
Интернеты в основном склонны считать немецкий MK гораздо более стабильным и устойчивым к ветру, но S800 манит своей складной конструкцией, теоретически более стабильными карбоновыми пропеллерами “из коробки” и очень открытым подходом, который проявляется например так.
Что касается x650, то его я, наверное, уверенно мог бы посоветовать разве что FPV-шникам. Коптер мощный — можно повесить много барахла на него, не сильно дорогой для своих возможностей, ну и киллер-фича — он складывается и становится очень компактным, когда нужно его куда-то отнести. Для аэро-фотографии, имхо, он не слишком стабилен. Даже ролики от самих XAircraft (где x650 стабилизируется с GPS) по-моему выглядят несколько менее интересными, чем ролики тех же DJI.
Чуть не забыл, я не являюсь “лётчиком” со стажем, поэтому могу в чём-то ошибаться. Здесь описан наш опыт, размером в год, на который пришлось около 50 вылазок с полётами в совершенно разных условиях.
Буду рад уточнениям, советам и вообще конструктивному обсуждению.
И да, я ещё много чего мог бы написать, но не могу сложить из этого повестование, зато с радостью отвечу на что смогу в комментариях.
Ресурсы в тему
Производители:
XAircraft: www.xaircraft.com
DJI: dji-innovation.com
MK: mikrokopter.de
Разное:
multicopterwiki.ru
igorkandaurov.ru/wiikii/doku.php
multicopter.org
Ну и напоследок, парочка наших фотографий:










