Скорее всего, это событие прошло практически незамеченным. Разве что профессионалы да особо интересующиеся любители вспомнили, что 2 июня 2003 года космический аппарат Европейского космического агентства «Марс-экспресс» («Mars Eхpress») отправился к Красной планете, впервые неся на своем борту стереоскопическую камеру высокого разрешения (High Resolution Stereo Camera, HRSC). Вообще, конечно, удивительно, что первыми в это деле были европейцы: из 20 успешных миссий по исследованию Марса, 13 были организованы США, 7 — СССР (последняя, «Фобос-2», завершилась в 1988 году) и всего одна (как раз «Mars Eхpress») — Европейским космическим агентством.
Остроту сюжету добавляет и тот факт, что первоначально камера разрабатывалась для российской миссии «Марс-96»: было изготовлено и откалибровано два полноценных модуля. Но после того, как российская АМС из-за отказа разгонного блока не вышла на отлётную траекторию, и разрушилась при входе в атмосферу Земли, Institute of Space Sensor Technology and Planetary Exploration модифицировал дублирующий модуль с целью его использования в планируемой европейской миссии. Жаль, конечно, что лавры участников развенчания «марсианского сфинкса» и составления потрясающих 3D карт Марса достались не российскому аппарату, но сама стереоскопическая камера, благодаря которой все это стало возможно, заслуживает отдельного рассказа.

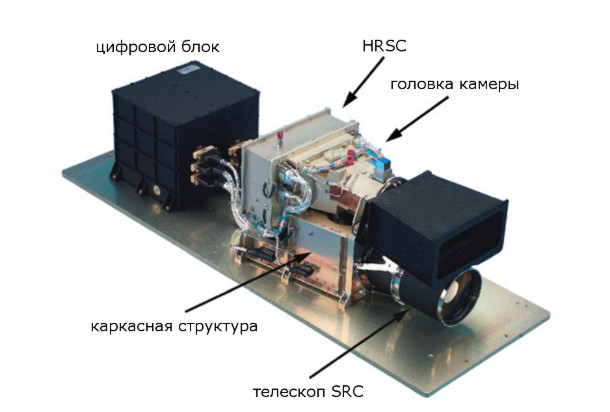
HRSC — это девятиканальная камера на основе ПЗС матрицы, позволяющая получать снимки с детализацией до 2 метров, а также строить цифровые модели рельефа. Основные детали камеры: цифровой блок (обеспечение подачи электричества к цифровым элементам камеры и сенсорам, управляющий процессор и блок компрессии данных) и собственно элементы камеры (каркас, на который крепится оптика и сенсоры, кроме того служит еще и радиатором; головка камеры, включающая в себя линзы объектива и оптическую скамейку; канал супер-разрешения, смонтированный внутри каркаса).
Оптика HRSC, расположенная в головке камеры, представляет собой апо-тессаровский объектив с фокусным расстоянием 175 мм (f/5,6), смонтированный на титановом основании. Коэффициент прозрачности варьируется от 0,37 для синего канала (440 нм) до 0,68 в панхроматическом диапазоне. Частотно-контрастная характеристика (MTF) оптики для центрального пикселя (надир) имеет значение 0,4 при 50 lp/mm, при отклонении на 20° от надира MTF составляет 0,33.
ПЗС-матрица состоит из 9 элементов Thomson THX 7808B, расположенных параллельно для работы в режиме push-broom съемки (о принципе действия которой я подробно рассказывал в статье про HiRISE). Электроника в головке камеры состоит из трех модулей, расположенных в фокальной плоскости. Каждый модуль содержит по три ПЗС и предусилителя. Каждый из 9 ПЗС содержит 5184 пикселя физическим размером 7 мкм (для сравнения: в HiRISE пиксель 12 мкм), что обеспечивает поверхностное разрешение в 10 м на пиксель при высоте полета 250 км.
HRSC позволяет делать стерео снимки c участием от 3 до 5 линий сенсоров, в том числе спереди — в надире — сзади (±18,9°), плюс два внутренних ряда сенсоров (±12.8°):
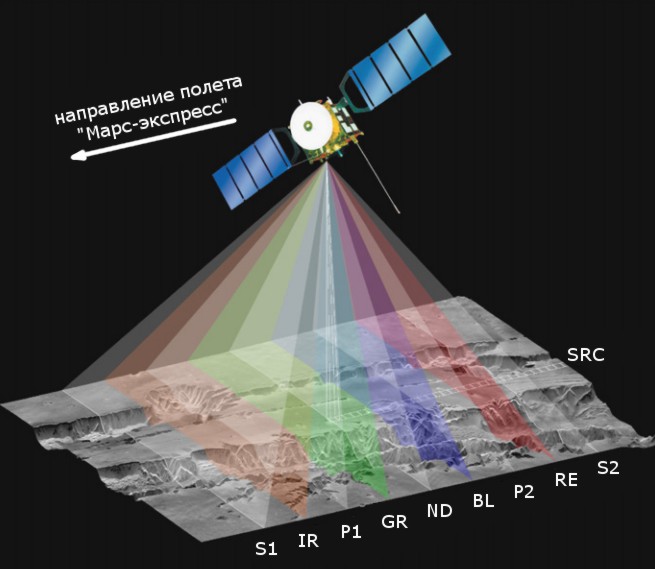
Углы захвата сенсоров: ND — надир; S1, S2 — стерео 1 и стерео 2 (±18.9°); P1 and P2 — фотометрия 1 и фотометрия 2 (±12.8°); IR — ближний инфракрасный канал (+15.9°); GR — зеленый канал (+3.3°); BL — голубой канал (+3.3°); RE — красный канал (-15.9°). Угол захвата поперек линии полета для всех 9 линий сенсоров составляет ±6°. SRC — зона охвата камерой супер разрешения.
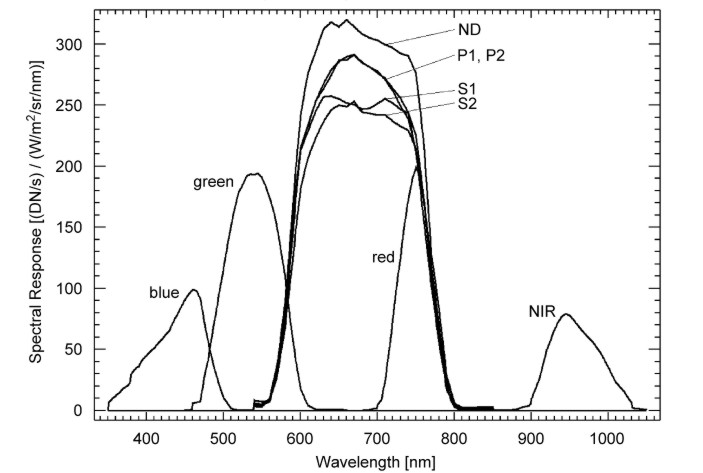
Стерео-каналы, фотометрия и надир работают в спектральном диапазоне 675±90 нм, голубой — 440±45 нм, зеленый — 530±45 нм, красный — 750±20 нм, ближний инфракрасный — 970±45 нм, SRC работает в панхроматическом диапазоне. График спектральной чувствительности для всех каналов:
Стерео съемка вдоль направления движения космического аппарата позволяет полностью избежать влияния атмосферных и световых факторов, а участие в формировании итогового изображения не менее 3 линий сенсоров дает четкую реконструкцию для создания цифровой модели рельефа с точностью до 1 пикселя. При использовании 5 панхроматических изображений итоговый кадр также содержит фотометрические характеристики рельефа.
Канал супер-разрешения, Super Resolution Channel (SRC) — это отдельная оптика и массив ПЗС с соответствующей электроникой. Оптическая система SRC представлет собой телескоп системы Максутова-Кассегрена с фокусным расстоянием 972 мм (f/11), оси которого расположены параллельно оптическим осям HRSC. Используемая оптическая схема сочетает телескоп Максутова с диоптрическим телеобъективом, который уменьшает общую длину конструкции и корректирует хроматические абберации в системе Максутова. Качество изображений находится на уровне дифракционного предела с контрастностью около 25% при Найквисте 55,5 lp/mm.
Сенсоры SRC — ПЗС Kodak KAI 1001 со сплошной разверткой размером 1024 х 1032 px и размером пикселя 9 мкм, что дает 2,3 м поверхности на пиксель при высоте 250 км. SRC механически и электронно связана с HRSC и передает данные на «Марс-экспресс» не напрямую, а отдельным (десятым) каналом по интерфейсам HRSC. SRC обладает специальной антиблюминговой защитой и электронным контролем экспозиции, позволяющим уменьшить смазывание изображения. Работа камеры супер разрешения предусматривает три режима: точечный, растровый и непрерывный. В точечном режиме изображения делаются не последовательно, в растровом — в определенном порядке, а в непрерывном формируется лента изображений.
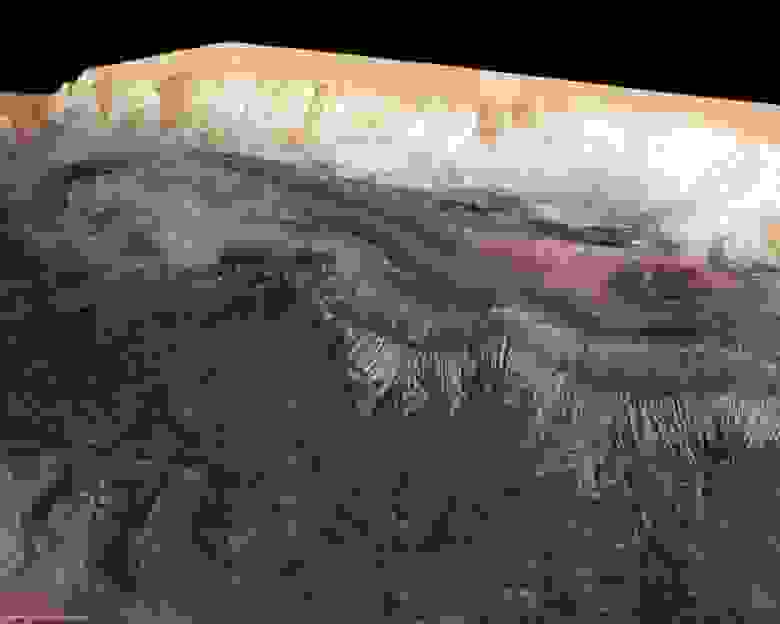
Конечно, при наличии HiRISE с пространственным разрешением в 0,3 м основной упор в научной ценности HRSC делается на построении цифровых моделей рельефа (digital terrain models, DTM). Исходные данные для построения DTM основываются на привязанных к местности изображениях с 5 панхроматических каналов: надира, стерео и фотометрических (спереди и сзади надира). Сопоставляя точки пересечения профилей и внутреннюю геометрию камеры, а также параметры орбиты «Марс-экспресса», получается сетка из координат трехмерных объектов, которая в дальнейшем интерполируется в растровую DTM. Пример: каньон Гебы в ложных цветах (изображение ESA/ DLR):
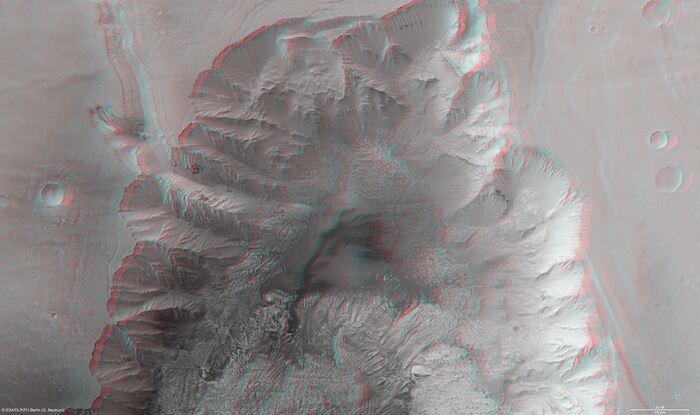
Анаглифные изображения также легко извлекаются из данных, полученных сенсорами HRSC. Если для получения модели рельефа требуется сопоставление нескольких уровней данных, особенно для исключения влияния топографии, то анаглиф — это просто корректировка исходных данных на плоскую поверхность (эллипсоид Марса). Если стерео данные берутся с одной орбиты, то такая корректировка уменьшает поперечный параллакс и дает превосходную стереопару эпиполярных изображений, состоящих из красного и зеленого диапазонов модели RGB. Пример — каньон Гебы (изображение ESA/ DLR):
Подводя краткий итог этому рассказу, отмечу несколько не совсем очевидных вещей. Казалось бы, зачем фотографировать Марс с разрешением 10 м/пиксель, если есть камеры, способные снимать с расрешением до 0,3 м/пиксель? Несмотря на совершенно невообразимое разрешение, HiRISE удалось снять всего 1% поверхности. В то время как HRSC практически закончил создание полной трехмерной карты Марса (90% на февраль 2013 года). Вторая особенность — возможность стереосъемки в реальном времени. Это единственная камера, которая делает снимки Марса не путем съемки с разных точек орбиты (когда неизбежно влияние атмосферных, световых и иных факторов), а путем одновременного сканирования разными линиями сенсоров.
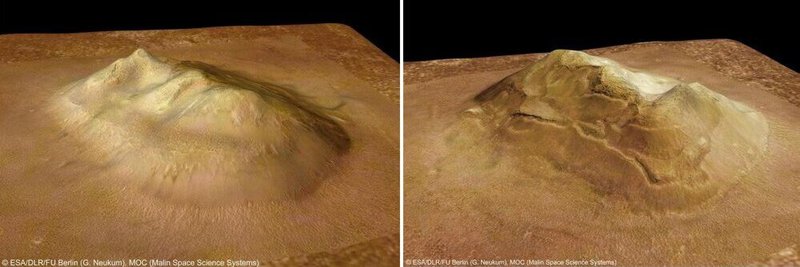
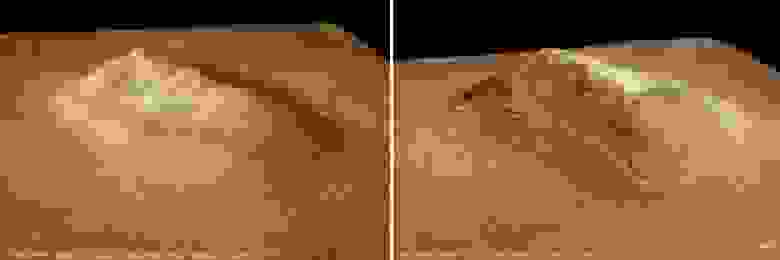
Ну и напоследок оставлю два изображения «марсианского сфинкса», сделанные HRSC, чтобы последователи культа #насаскрывает окончательно убедились, что #европатожескрывает ;-)
Остроту сюжету добавляет и тот факт, что первоначально камера разрабатывалась для российской миссии «Марс-96»: было изготовлено и откалибровано два полноценных модуля. Но после того, как российская АМС из-за отказа разгонного блока не вышла на отлётную траекторию, и разрушилась при входе в атмосферу Земли, Institute of Space Sensor Technology and Planetary Exploration модифицировал дублирующий модуль с целью его использования в планируемой европейской миссии. Жаль, конечно, что лавры участников развенчания «марсианского сфинкса» и составления потрясающих 3D карт Марса достались не российскому аппарату, но сама стереоскопическая камера, благодаря которой все это стало возможно, заслуживает отдельного рассказа.

HRSC — это девятиканальная камера на основе ПЗС матрицы, позволяющая получать снимки с детализацией до 2 метров, а также строить цифровые модели рельефа. Основные детали камеры: цифровой блок (обеспечение подачи электричества к цифровым элементам камеры и сенсорам, управляющий процессор и блок компрессии данных) и собственно элементы камеры (каркас, на который крепится оптика и сенсоры, кроме того служит еще и радиатором; головка камеры, включающая в себя линзы объектива и оптическую скамейку; канал супер-разрешения, смонтированный внутри каркаса).
Технические характеристики
| HRSC | SRC | |
|---|---|---|
| Механические и электрические параметры | ||
| Цифровой блок | 232 мм x 282 мм x 212 мм | |
| Блок камеры | 510 мм x 289 мм x 270 мм | |
| Масса | 20,4 кг | |
| Потребляемая мощность во время съемки | 45,7 Вт | 3,0 Вт |
| Уровень радиационной защиты | 10 крад | |
| Оптико-электронные параметры | ||
| Тип ПЗС | THX 7808B | Kodak KAI 1001 |
| Физический размер пикселя | 7 х 7 мкм | 9 х 9 мкм |
| Пространственное разрешение при высоте 250 км | 10 х 10 м | 2,3 х 2,3 м |
| Угол обзора на 1 пиксель | 8,25" | 2" |
| Количество активных пикселей в ПЗС | 9 ПЗС по 5184 px | 1024 x 1032 px |
| Размер захватываемой поверхности | 52,2 км в ширину (длина определяется временем сканирования) | 2,35 х 2,35 км |
| Емкость максимального заполнения потенциальной ямы | 420000 е- | 48000 е- |
| Спектральные фильтры | 5 панхроматических, 4 цветных | - |
| Спектральный диапазон | Стерео-каналы, фотометрия и надир — 675±90 нм, голубой — 440±45 нм, зеленый — 530±45 нм, красный — 750±20 нм, ближний инфракрасный — 970±45 нм | - |
| MTF центрального пикселя | 0,4 при 50 lp/mm | 0,28 при 50 lp/mm |
| MTF в 20° от надира | 0,33 при 50 lp/mm | - |
| Соотношение сигнал/шум | >>100 (панхроматические сенсоры) >80 (цветные сенсоры, голубой >40) |
>70 |
| Цифровые особенности | ||
| Компрессия в реальном времени | присутствует, JPEG | |
| Степень компрессии | 2-20 (возможно без компрессии) | |
| Максимальная скорость передачи выходных данных | 25 Мбит/с после компрессии (снижается при увеличении высоты орбиты) | |
| Съемка | ||
| Время экспозиции пикселя | от 2,24 мс до 54,5 мс | от 0,5 мс до 50 с |
| Сложение пикселей | 1x1, 2x2, 4x4, 8x8 | - |
| Размер поверхности на итоговом изображении (при высоте съемки 250 км) | 53 x 330 км | 2.4 x 2.4 км |
| Средний объем передаваемых данных в сутки | около 2 Гбит | |
| Внутренний буфер для хранения данных | нет | 4 изображения при 14-битном разрешении |
| Среднее время полного цикла съемки одного изображения | от 3 до 40 минут | |

Оптика HRSC, расположенная в головке камеры, представляет собой апо-тессаровский объектив с фокусным расстоянием 175 мм (f/5,6), смонтированный на титановом основании. Коэффициент прозрачности варьируется от 0,37 для синего канала (440 нм) до 0,68 в панхроматическом диапазоне. Частотно-контрастная характеристика (MTF) оптики для центрального пикселя (надир) имеет значение 0,4 при 50 lp/mm, при отклонении на 20° от надира MTF составляет 0,33.
ПЗС-матрица состоит из 9 элементов Thomson THX 7808B, расположенных параллельно для работы в режиме push-broom съемки (о принципе действия которой я подробно рассказывал в статье про HiRISE). Электроника в головке камеры состоит из трех модулей, расположенных в фокальной плоскости. Каждый модуль содержит по три ПЗС и предусилителя. Каждый из 9 ПЗС содержит 5184 пикселя физическим размером 7 мкм (для сравнения: в HiRISE пиксель 12 мкм), что обеспечивает поверхностное разрешение в 10 м на пиксель при высоте полета 250 км.
HRSC позволяет делать стерео снимки c участием от 3 до 5 линий сенсоров, в том числе спереди — в надире — сзади (±18,9°), плюс два внутренних ряда сенсоров (±12.8°):
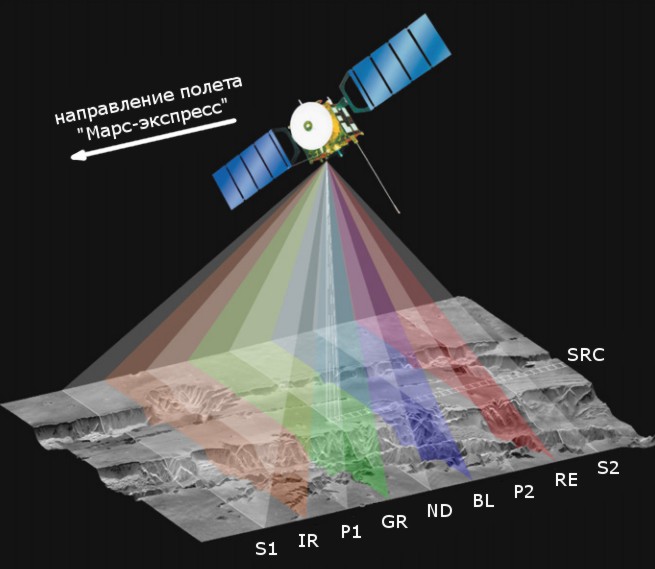
Углы захвата сенсоров: ND — надир; S1, S2 — стерео 1 и стерео 2 (±18.9°); P1 and P2 — фотометрия 1 и фотометрия 2 (±12.8°); IR — ближний инфракрасный канал (+15.9°); GR — зеленый канал (+3.3°); BL — голубой канал (+3.3°); RE — красный канал (-15.9°). Угол захвата поперек линии полета для всех 9 линий сенсоров составляет ±6°. SRC — зона охвата камерой супер разрешения.
Стерео-каналы, фотометрия и надир работают в спектральном диапазоне 675±90 нм, голубой — 440±45 нм, зеленый — 530±45 нм, красный — 750±20 нм, ближний инфракрасный — 970±45 нм, SRC работает в панхроматическом диапазоне. График спектральной чувствительности для всех каналов:

Стерео съемка вдоль направления движения космического аппарата позволяет полностью избежать влияния атмосферных и световых факторов, а участие в формировании итогового изображения не менее 3 линий сенсоров дает четкую реконструкцию для создания цифровой модели рельефа с точностью до 1 пикселя. При использовании 5 панхроматических изображений итоговый кадр также содержит фотометрические характеристики рельефа.
Канал супер-разрешения, Super Resolution Channel (SRC) — это отдельная оптика и массив ПЗС с соответствующей электроникой. Оптическая система SRC представлет собой телескоп системы Максутова-Кассегрена с фокусным расстоянием 972 мм (f/11), оси которого расположены параллельно оптическим осям HRSC. Используемая оптическая схема сочетает телескоп Максутова с диоптрическим телеобъективом, который уменьшает общую длину конструкции и корректирует хроматические абберации в системе Максутова. Качество изображений находится на уровне дифракционного предела с контрастностью около 25% при Найквисте 55,5 lp/mm.
Сенсоры SRC — ПЗС Kodak KAI 1001 со сплошной разверткой размером 1024 х 1032 px и размером пикселя 9 мкм, что дает 2,3 м поверхности на пиксель при высоте 250 км. SRC механически и электронно связана с HRSC и передает данные на «Марс-экспресс» не напрямую, а отдельным (десятым) каналом по интерфейсам HRSC. SRC обладает специальной антиблюминговой защитой и электронным контролем экспозиции, позволяющим уменьшить смазывание изображения. Работа камеры супер разрешения предусматривает три режима: точечный, растровый и непрерывный. В точечном режиме изображения делаются не последовательно, в растровом — в определенном порядке, а в непрерывном формируется лента изображений.
Конечно, при наличии HiRISE с пространственным разрешением в 0,3 м основной упор в научной ценности HRSC делается на построении цифровых моделей рельефа (digital terrain models, DTM). Исходные данные для построения DTM основываются на привязанных к местности изображениях с 5 панхроматических каналов: надира, стерео и фотометрических (спереди и сзади надира). Сопоставляя точки пересечения профилей и внутреннюю геометрию камеры, а также параметры орбиты «Марс-экспресса», получается сетка из координат трехмерных объектов, которая в дальнейшем интерполируется в растровую DTM. Пример: каньон Гебы в ложных цветах (изображение ESA/ DLR):

Анаглифные изображения также легко извлекаются из данных, полученных сенсорами HRSC. Если для получения модели рельефа требуется сопоставление нескольких уровней данных, особенно для исключения влияния топографии, то анаглиф — это просто корректировка исходных данных на плоскую поверхность (эллипсоид Марса). Если стерео данные берутся с одной орбиты, то такая корректировка уменьшает поперечный параллакс и дает превосходную стереопару эпиполярных изображений, состоящих из красного и зеленого диапазонов модели RGB. Пример — каньон Гебы (изображение ESA/ DLR):

Подводя краткий итог этому рассказу, отмечу несколько не совсем очевидных вещей. Казалось бы, зачем фотографировать Марс с разрешением 10 м/пиксель, если есть камеры, способные снимать с расрешением до 0,3 м/пиксель? Несмотря на совершенно невообразимое разрешение, HiRISE удалось снять всего 1% поверхности. В то время как HRSC практически закончил создание полной трехмерной карты Марса (90% на февраль 2013 года). Вторая особенность — возможность стереосъемки в реальном времени. Это единственная камера, которая делает снимки Марса не путем съемки с разных точек орбиты (когда неизбежно влияние атмосферных, световых и иных факторов), а путем одновременного сканирования разными линиями сенсоров.
Ну и напоследок оставлю два изображения «марсианского сфинкса», сделанные HRSC, чтобы последователи культа #насаскрывает окончательно убедились, что #европатожескрывает ;-)