Привет, Хабр!
С недавних пор я стал увлекаться полетами на квадрокоптере AR.Drone 2.0, а именно с момента, как друзья подарили мне его на день рождения. Хотя на соревнования и «покатушки» с другими любителями времени нет, на нем довольно интересно полетать в том же офисе под веселые возгласы коллег. Да и поэкспериментировать можно – с дополнительными модулями и модами.
В этом посте я написал о собственном опыте эксплуатации и постарался собрать список советов. Если у вас есть подобный опыт – пишите о нем в комментариях, чтобы можно было составить максимально полное впечатление для начинающих летчиков. А у тех, кто планирует купить коптер – сформировалось взвешенное впечатление о гаджете.

В таблице я собрал все особенности Ar.Drone, выявленные за полгода полетов
Для тех, кто не особо интересовался этой темой. Квадрокоптер позиционируется производителем как «дрон дополненной реальности» — Augmented Reality Drone. Он работает под операционной системой Linux, при этом управление вы можете осуществлять с устройств на Android и iOS. В моем случае это iPhone 5S. API у дрона открытый, что позволяет допиливать его по необходимости для участия в различных соревнованиях.
Но об этом на Хабре писали неоднократно, так что лучше почитайте этот обзор.
За полгода я выявил несколько недостатков, некоторые из которых можно решить приобретением дополнительных частей или устройств, а с некоторыми остается только смириться. Именно этим опытом я хочу поделиться с вами.
Основная проблема всех современных летающих гаджетов — это небольшое время работы без подзарядки. Хотелось бы, чтобы квадрокоптер мог летать часами, но это на данный момент невозможно. Штатного аккумулятора в 1000 mAh хватает всего на 9 минут с включенной видеозаписью. Вначале при 30% заряда софт запрещает делать флипы. На 15% начинает орать, а около нуля дрон просто принудительно снижается и глушит движки после касания земли. За все время мне так и не удалось выехать за город, чтобы полетать на открытом пространстве, так что приходится лавировать над территорией офисного центра и припаркованными авто. Если проморгать уровень заряда, можно потерять дрон или поцарапать чужой автомобиль.
Проблема длительности полета решается приобретением аккумулятора на 2000mAh, но аккумуляторы большей емкости толще и в штатном корпусе держатся плохо. Это регулярно приводит к проблемам в полете.

Аккумуляторы. Видна разница в толщине, что тоже не было предусмотрено изначально. Однако сейчас аккум на 2000mAh продается того же размера, что штатный на 1000mAh.
Родные шестеренки на винтах не отличаются долгожительством, после аварий они теряют зубцы и их приходится менять. Изнашивание неоригинальных шестеренок происходит довольно быстро даже в режиме бережных полетов, но стоят они недорого и закупить их сразу можно десяток.

Более того, в случае удара винтом шестерни попросту выходят из строя. Любые столкновения во время полета чреваты тем, что зубцы будут “съедены”.
Первым делом я приобрел несколько комплектов запасных шестерней, за время использования на моем счету итого 4 комплекта.

Вы слышали про эффект Даннинга-Крюгера? Это когда вы свои способности преувеличиваете. Я уверен, почти все испытывали его в первый раз при полетах на квадрокоптере. И почти все каким-либо образом квадрокоптер роняли и бились им об стену.
Из этого выходит следующий недостаток: при жестких посадках можно сломать раму, о чем часто пишут. Поломать ее мне, правда, не удалось, зато одна из “ног” отлетела при столкновении со стеной во время порыва ветра. Крестовина осталась целой. Но лучше заранее предусмотреть возможность сломать её и докупить комплект. Вообще, даже в штатном режиме у Ar.Drone весьма некультяпистая автоматическая посадка.
Фото утраченной «ноги».

Защита шестеренок из карбона отдельно была преобретена мной и установлена, это существенно увеличило срок службы шестеренок.

Настоящим «лидером» по ремонту является кожух для полета внутри помещений. Регулярно запуская комптер в офисе, так как он появился у меня зимой, каждый второй из полетов заканчивался легкой аварией. Приходилось брать в руки клей.
Это навело меня на мысль о необходимости найти или же сделать самому кожух покрепче. Это план на будущее.
Кожух для полета на улице лишен ободов, защищающих лопасти, выглядит явно круче.
За время экслуатации и он несколько раз серьезно пострадал.

Нижняя часть корпуса используется постоянно, поэтому ее тоже пришлось укреплять.

Радиус полета — еще одно слабое место. Я летал с iPhone 5S и 4S, и радиус полета при этом составлял около 25 метров. В случае c iPad 2 радиус достиг 50 метров, но все равно, особо не разгонишься.
Управление под iOS отличается невысокой чувствительностью и большим временем отклика. А в случае, если во время полета вам кто-то позвонит, то квадрокоптер зависнет в воздухе, а если вы решите пару минут поболтать, то дрон просто приземлится на ту же точку, над которой его застиг звонок. Даже если там озеро, кишащее крокодилами.
На такой случай было бы круто иметь автовозврат к месту взлета.
Кроме того, есть еще одно неудобство с управлением. Сейчас в App Store есть куча приложений для управления дроном, все они оформлены весьма похоже, а при запуске одного из приложений оно может предложить запустить уже другое. В итоге на моем телефоне 5 приложений для Ar.Drone и я до сих пор не очень понимаю, для чего они? Так случилась из-за того, что производитель расскрыл API, и теперь каждый может написать и опубликовать свое приложение для полета на этом квадрокоптере.
Внезапно штатные пропеллеры работают отлично. Иногда пишут, что это расходные материал, и лучше закупать их пачками.
В моем случае все вышло иначе: я закупил карбоновые пропеллеры, но в итоге вернулся на родные пропеллеры и продолжил летать с ними. Вид уже потрепанный, но летают они нормально.
Карбоновые пропеллеры отработали всего несколько дней, после очередной аварии была сорвана резьба у втулок, а новые втулки и болты отдельно от винтов найти пока не удалось.
Модуль GPS предназначен для того, чтобы заставить ваш квадрокоптер летать в нужных направлениях автономно. Например, следить за работой заключенных на плантациях. Я повелся на него и хотел протестировать возврат к точке взлета, так как летать у меня получается только в городе и чаще всего над крышами соседних офисов. А полюбившийся подарок потерять не хочется.
Этот модуль пока мне кажется бесмысленным и беспощадным расширением. Родной софт для полета по GPS выглядит крайне убого и неудобно, по крайней мере на iOS. Мне так и не удалось полетать по GPS еще вот по какой причине: размещение штатного usb разъема в Ar.Drone 2.0 удобно для установки флешки, но для подключения модуля крайне не удобно. Приходится просто вкладывать модуль во внутрь, он там свободно болтается и при полетах это мешает, флипы делать нельзя.

Однажды во время флипа под резким порывом ветра аккумулятор вместе с модулем GPS выпали, открыли кожух дрона, что в итоге привело к падению и тяжелым травмам аппарата.
Тут тоже хотелось бы иметь другой кожух, в котором было бы предусмотрено место для модуля.
После каждой аварии или потери связи нужно открыть крышку дрона, отсоединить колодку питания, после чего с аппаратом снова можно работать. Гораздо удобнее было бы иметь для этих целей отдельную физическую кнопку. Это не самая удобная процедура.
Хотя квадрокоптер способен поднять в воздух камеру GoPro, сразу же после этого управлять им становится не очень-то легко, его вертит из стороны в сторону от малейшего ветерка. Поэтому приходилось пользоваться штатной камерой, разрешение вполне приличное.
Дно квадрокоптера защищено тонкой крышкой, которая может слегка отклеиться и закрыть собой нижнюю камеру. Аппарат начинает думать, что под ним — препятствие, и пытаться его обойти, вытворяя полнейший ад, стучась об стены, людей и пугая несчастных котиков.
Кстати, эти две огромные белые штуки – колпачки от бутылки с жидкостью для очистки маркерных досок, после потери одной из опор пришлось придумывать что-то очень быстро. Двусторонний скотч и смекалка спасли ситуацию.
В отличие от больших дронов, между двигателем и пропеллеров есть шестеренки, втулки и вал, а смазать их нельзя по объективным причинам. Втулка была заменена на подшипник, чтобы уменьшить уровень шума. Но после приземления в траву или на грязную дорогу шестеренки встанут, так как на смазку просто налипнет пыль. Приходится просто мириться с шумом.
На фотографии желтые – родные медные втулки, а стальные – специально заказанные мной микроподшипники. Не уверен, что этот мод объективно снизил шум, но впечатления от работы несколько улучшились.
В ходе подготовки этого поста мы планировали снять крутое видео с красивыми полетами Ar.Drone в ограниченном пространстве. Но случилось страшное: дрон стал вести себя неадекватно – вначале он атаковал нашего милого оператора, налетев со спины, а позже целился и в припаркованные неподалеку автомобили. Полеты пришлось свернуть, а видео собрать из того, что получилось.
Небольшой бонус: краш-тест блондинки глазами квадрокоптера
После этой аварии дрон начал сходить с ума, например этот цирковой номер он исполнил совершенно произвольно и без команды оператора.
Несмотря на все описанные истории, мне очень понравился Ar.Drone. Это очень крутая игрушка за свои деньги, которая требует ухода и обслуживания. Очередная авария только разжигает интерес, а впечатления от полета – незабываемы. Я однозначно снова отремонтирую свой дрон и до наступления зимы еще не раз планирую полетать. А так же постараюсь исправить существующие проблемы, но об этом я планирую рассказать в другой раз.
С недавних пор я стал увлекаться полетами на квадрокоптере AR.Drone 2.0, а именно с момента, как друзья подарили мне его на день рождения. Хотя на соревнования и «покатушки» с другими любителями времени нет, на нем довольно интересно полетать в том же офисе под веселые возгласы коллег. Да и поэкспериментировать можно – с дополнительными модулями и модами.
В этом посте я написал о собственном опыте эксплуатации и постарался собрать список советов. Если у вас есть подобный опыт – пишите о нем в комментариях, чтобы можно было составить максимально полное впечатление для начинающих летчиков. А у тех, кто планирует купить коптер – сформировалось взвешенное впечатление о гаджете.

В таблице я собрал все особенности Ar.Drone, выявленные за полгода полетов
| Проблема | Описание | Решение |
|---|---|---|
| Время полёта | 9 минут на штатном аккумуляторе | Покупка аккумулятора большей емкости |
| Изнашивание шестеренок | При обычной эксплуатации | Покупка запасных, несколько комплектов всегда должны быть под рукой |
| Поломка шестерёнок | При столкновениях и падениях | Покупка запасных |
| Рама | При жесткой посадке может лопнуть крестовина, а «ноги» могут отлететь при столкновении с препятствием во время полета |
Покупка комплекта из крестовины и т.д. |
| Корпус | Кожух для помещений постоянно ломается при малейшем столкновении, часто его травмируют сами винты, которые он и должен защищать | Клей |
| Радиус полета | 25 метров с iPhone 5, 50 метров с iPad 2 | Необходимо использовать роутер, внешнюю антенну для дрона |
| Управление | Множество непонятных приложениий, а управление со смартфона не очень удобно | RC мод, переход на традиционный пульт для радиоуправляемых моделей |
| Пропеллеры | Карбоновые приказали долго жить после первой аварии, хрупкие | Вернул штатные, но необходимо иметь пару комплектов в запасе |
| Установка штатного GPS модуля | Не вмещается в корпус | Сделать новую крышку или доработать напильником |
| Сброс питания | После падения или потери связи нужно вручную отключать аккумулятор | Вывод отдельного тумблера |
| Малая грузоподъем- ность |
С GoPro на борту коптер летает тяжело, в кадр попадают пропеллеры | Для GoPro нужен просто другой коптер |
| Отклеивание крышки дна | После нескольких посадок крышка начала съезжать и загораживать нижнюю камеру | Сделать новую в перспективе, а пока спас клеящий пистолет |
| Шум при полетах | Конструкторы придумали слишком сложную трансмиссию, она хрупкая и шумит | Замена втулок на подшипники, но это мало влияет на шум, остается только смириться |
Кратко об AR. Drone 2.0
Для тех, кто не особо интересовался этой темой. Квадрокоптер позиционируется производителем как «дрон дополненной реальности» — Augmented Reality Drone. Он работает под операционной системой Linux, при этом управление вы можете осуществлять с устройств на Android и iOS. В моем случае это iPhone 5S. API у дрона открытый, что позволяет допиливать его по необходимости для участия в различных соревнованиях.
Но об этом на Хабре писали неоднократно, так что лучше почитайте этот обзор.
Технические характеристики
Процессор: 1GHz ARM Cortex A8
Видеопроцессор: 800 MHz DSP TMS320DMC64x
RAM: 1Гбит DDR2 RAM
Операционная система: Linux 2.6.32
Моторы: 4 х 14,5 Вт, 28500 RPM
Контроллеры моторов: 8 MIPS AVR CPU
Максимальная скорость: 18 км/ч
Фронтальная камера: HD 720p
Камера на дне: QVGA 320х240
Штатный аккумулятор: Литий-полимерный, 3 ячейки, 11,1V, 1000 mAh.
Видеопроцессор: 800 MHz DSP TMS320DMC64x
RAM: 1Гбит DDR2 RAM
Операционная система: Linux 2.6.32
Моторы: 4 х 14,5 Вт, 28500 RPM
Контроллеры моторов: 8 MIPS AVR CPU
Максимальная скорость: 18 км/ч
Фронтальная камера: HD 720p
Камера на дне: QVGA 320х240
Штатный аккумулятор: Литий-полимерный, 3 ячейки, 11,1V, 1000 mAh.
За полгода я выявил несколько недостатков, некоторые из которых можно решить приобретением дополнительных частей или устройств, а с некоторыми остается только смириться. Именно этим опытом я хочу поделиться с вами.
1. Время полета
Основная проблема всех современных летающих гаджетов — это небольшое время работы без подзарядки. Хотелось бы, чтобы квадрокоптер мог летать часами, но это на данный момент невозможно. Штатного аккумулятора в 1000 mAh хватает всего на 9 минут с включенной видеозаписью. Вначале при 30% заряда софт запрещает делать флипы. На 15% начинает орать, а около нуля дрон просто принудительно снижается и глушит движки после касания земли. За все время мне так и не удалось выехать за город, чтобы полетать на открытом пространстве, так что приходится лавировать над территорией офисного центра и припаркованными авто. Если проморгать уровень заряда, можно потерять дрон или поцарапать чужой автомобиль.
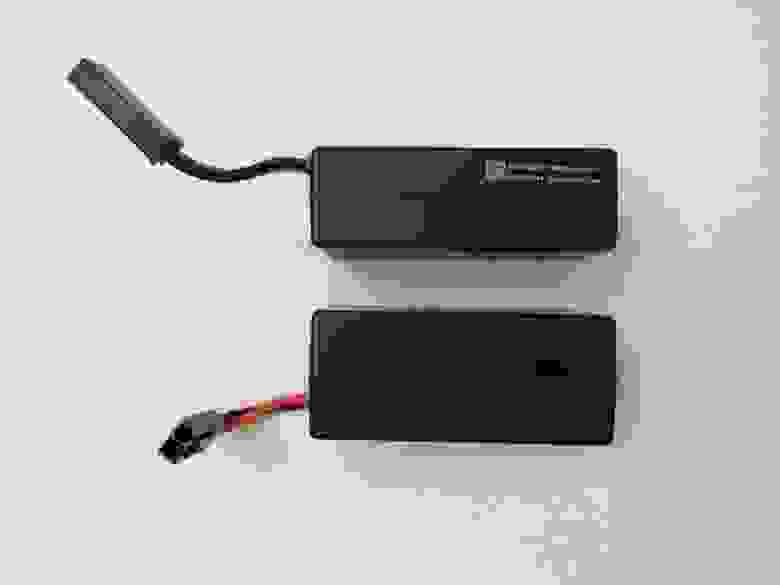
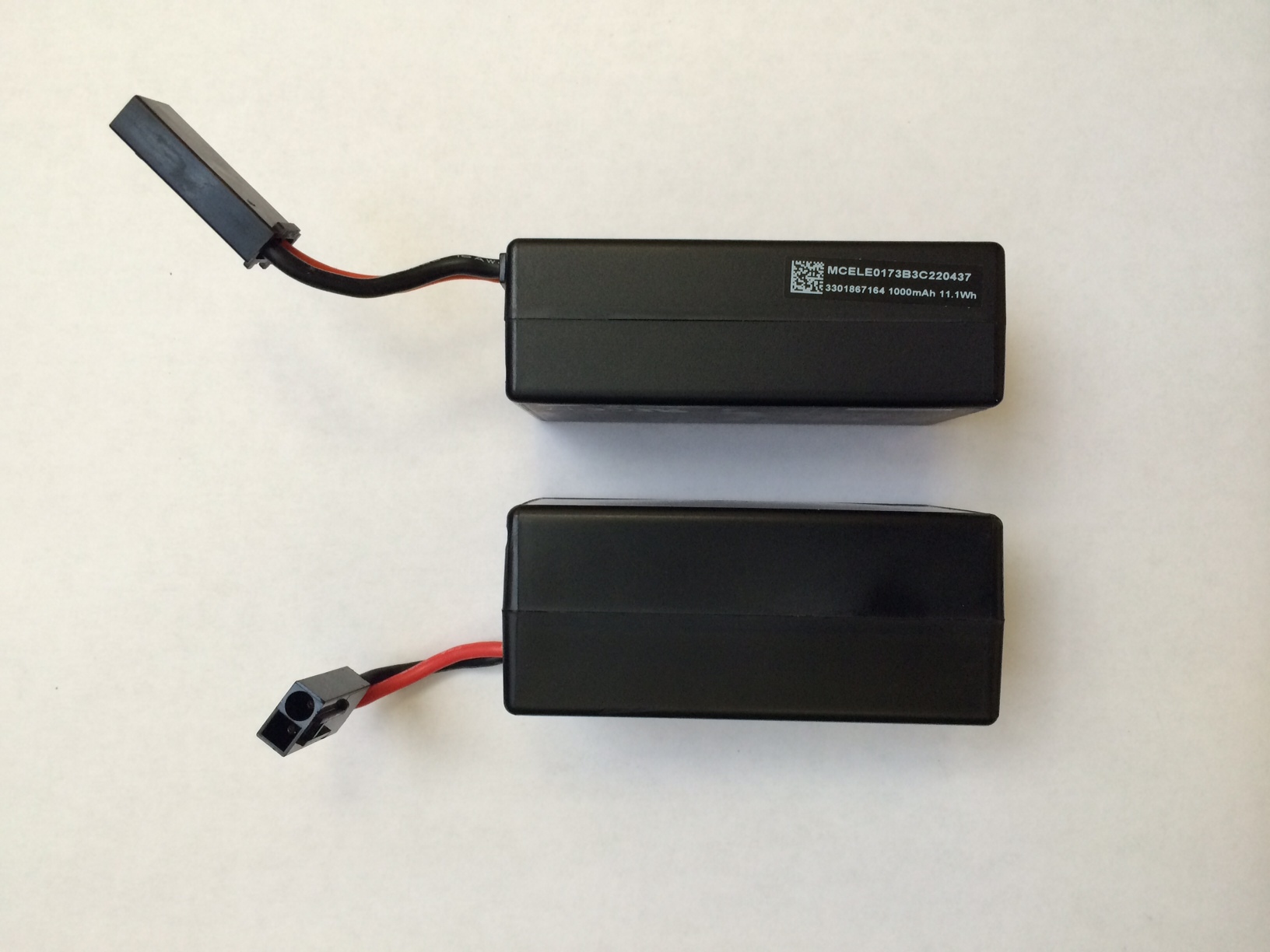
Проблема длительности полета решается приобретением аккумулятора на 2000mAh, но аккумуляторы большей емкости толще и в штатном корпусе держатся плохо. Это регулярно приводит к проблемам в полете.

Аккумуляторы. Видна разница в толщине, что тоже не было предусмотрено изначально. Однако сейчас аккум на 2000mAh продается того же размера, что штатный на 1000mAh.
2. Изнашивание шестеренок
Родные шестеренки на винтах не отличаются долгожительством, после аварий они теряют зубцы и их приходится менять. Изнашивание неоригинальных шестеренок происходит довольно быстро даже в режиме бережных полетов, но стоят они недорого и закупить их сразу можно десяток.

3. Поломка шестеренок
Более того, в случае удара винтом шестерни попросту выходят из строя. Любые столкновения во время полета чреваты тем, что зубцы будут “съедены”.
Первым делом я приобрел несколько комплектов запасных шестерней, за время использования на моем счету итого 4 комплекта.

4. Рама
Вы слышали про эффект Даннинга-Крюгера? Это когда вы свои способности преувеличиваете. Я уверен, почти все испытывали его в первый раз при полетах на квадрокоптере. И почти все каким-либо образом квадрокоптер роняли и бились им об стену.
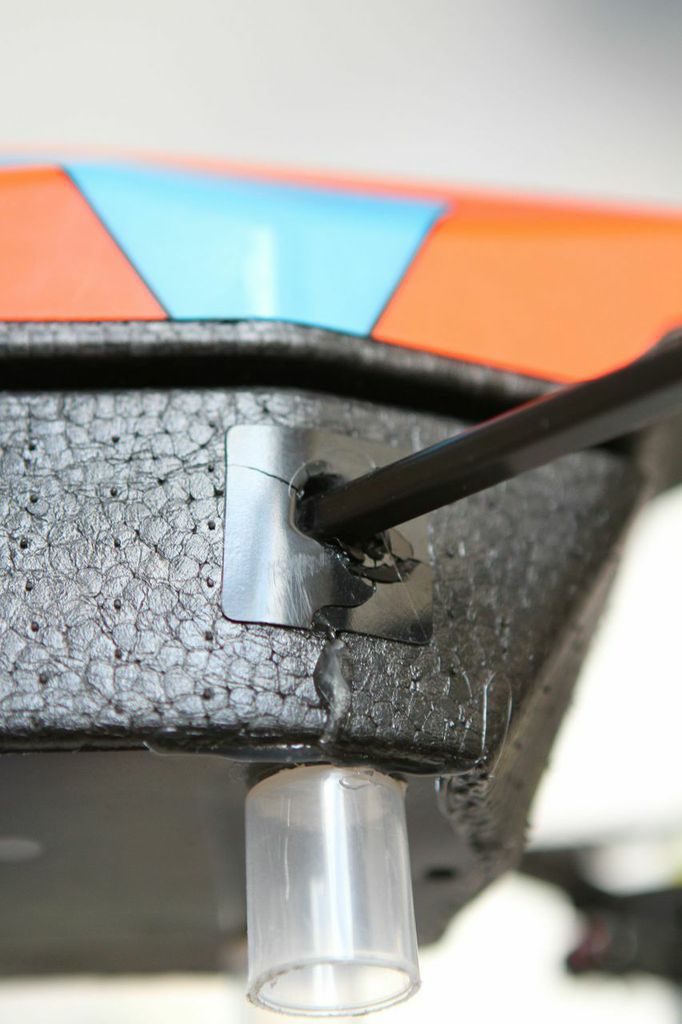
Из этого выходит следующий недостаток: при жестких посадках можно сломать раму, о чем часто пишут. Поломать ее мне, правда, не удалось, зато одна из “ног” отлетела при столкновении со стеной во время порыва ветра. Крестовина осталась целой. Но лучше заранее предусмотреть возможность сломать её и докупить комплект. Вообще, даже в штатном режиме у Ar.Drone весьма некультяпистая автоматическая посадка.
Фото утраченной «ноги».

Защита шестеренок из карбона отдельно была преобретена мной и установлена, это существенно увеличило срок службы шестеренок.

5. Корпус
Настоящим «лидером» по ремонту является кожух для полета внутри помещений. Регулярно запуская комптер в офисе, так как он появился у меня зимой, каждый второй из полетов заканчивался легкой аварией. Приходилось брать в руки клей.
Это навело меня на мысль о необходимости найти или же сделать самому кожух покрепче. Это план на будущее.
Кожух для полета на улице лишен ободов, защищающих лопасти, выглядит явно круче.
За время экслуатации и он несколько раз серьезно пострадал.

Нижняя часть корпуса используется постоянно, поэтому ее тоже пришлось укреплять.
6. Радиус полета
Радиус полета — еще одно слабое место. Я летал с iPhone 5S и 4S, и радиус полета при этом составлял около 25 метров. В случае c iPad 2 радиус достиг 50 метров, но все равно, особо не разгонишься.
7. Управление
Управление под iOS отличается невысокой чувствительностью и большим временем отклика. А в случае, если во время полета вам кто-то позвонит, то квадрокоптер зависнет в воздухе, а если вы решите пару минут поболтать, то дрон просто приземлится на ту же точку, над которой его застиг звонок. Даже если там озеро, кишащее крокодилами.
На такой случай было бы круто иметь автовозврат к месту взлета.
Кроме того, есть еще одно неудобство с управлением. Сейчас в App Store есть куча приложений для управления дроном, все они оформлены весьма похоже, а при запуске одного из приложений оно может предложить запустить уже другое. В итоге на моем телефоне 5 приложений для Ar.Drone и я до сих пор не очень понимаю, для чего они? Так случилась из-за того, что производитель расскрыл API, и теперь каждый может написать и опубликовать свое приложение для полета на этом квадрокоптере.
8. Пропеллеры
Внезапно штатные пропеллеры работают отлично. Иногда пишут, что это расходные материал, и лучше закупать их пачками.
В моем случае все вышло иначе: я закупил карбоновые пропеллеры, но в итоге вернулся на родные пропеллеры и продолжил летать с ними. Вид уже потрепанный, но летают они нормально.
Карбоновые пропеллеры отработали всего несколько дней, после очередной аварии была сорвана резьба у втулок, а новые втулки и болты отдельно от винтов найти пока не удалось.
9. Установка GPS модуля
Модуль GPS предназначен для того, чтобы заставить ваш квадрокоптер летать в нужных направлениях автономно. Например, следить за работой заключенных на плантациях. Я повелся на него и хотел протестировать возврат к точке взлета, так как летать у меня получается только в городе и чаще всего над крышами соседних офисов. А полюбившийся подарок потерять не хочется.
Этот модуль пока мне кажется бесмысленным и беспощадным расширением. Родной софт для полета по GPS выглядит крайне убого и неудобно, по крайней мере на iOS. Мне так и не удалось полетать по GPS еще вот по какой причине: размещение штатного usb разъема в Ar.Drone 2.0 удобно для установки флешки, но для подключения модуля крайне не удобно. Приходится просто вкладывать модуль во внутрь, он там свободно болтается и при полетах это мешает, флипы делать нельзя.

Однажды во время флипа под резким порывом ветра аккумулятор вместе с модулем GPS выпали, открыли кожух дрона, что в итоге привело к падению и тяжелым травмам аппарата.
Тут тоже хотелось бы иметь другой кожух, в котором было бы предусмотрено место для модуля.
10. Сброс питания
После каждой аварии или потери связи нужно открыть крышку дрона, отсоединить колодку питания, после чего с аппаратом снова можно работать. Гораздо удобнее было бы иметь для этих целей отдельную физическую кнопку. Это не самая удобная процедура.
11. Небольшая грузоподъемность
Хотя квадрокоптер способен поднять в воздух камеру GoPro, сразу же после этого управлять им становится не очень-то легко, его вертит из стороны в сторону от малейшего ветерка. Поэтому приходилось пользоваться штатной камерой, разрешение вполне приличное.
12. Крышка дна
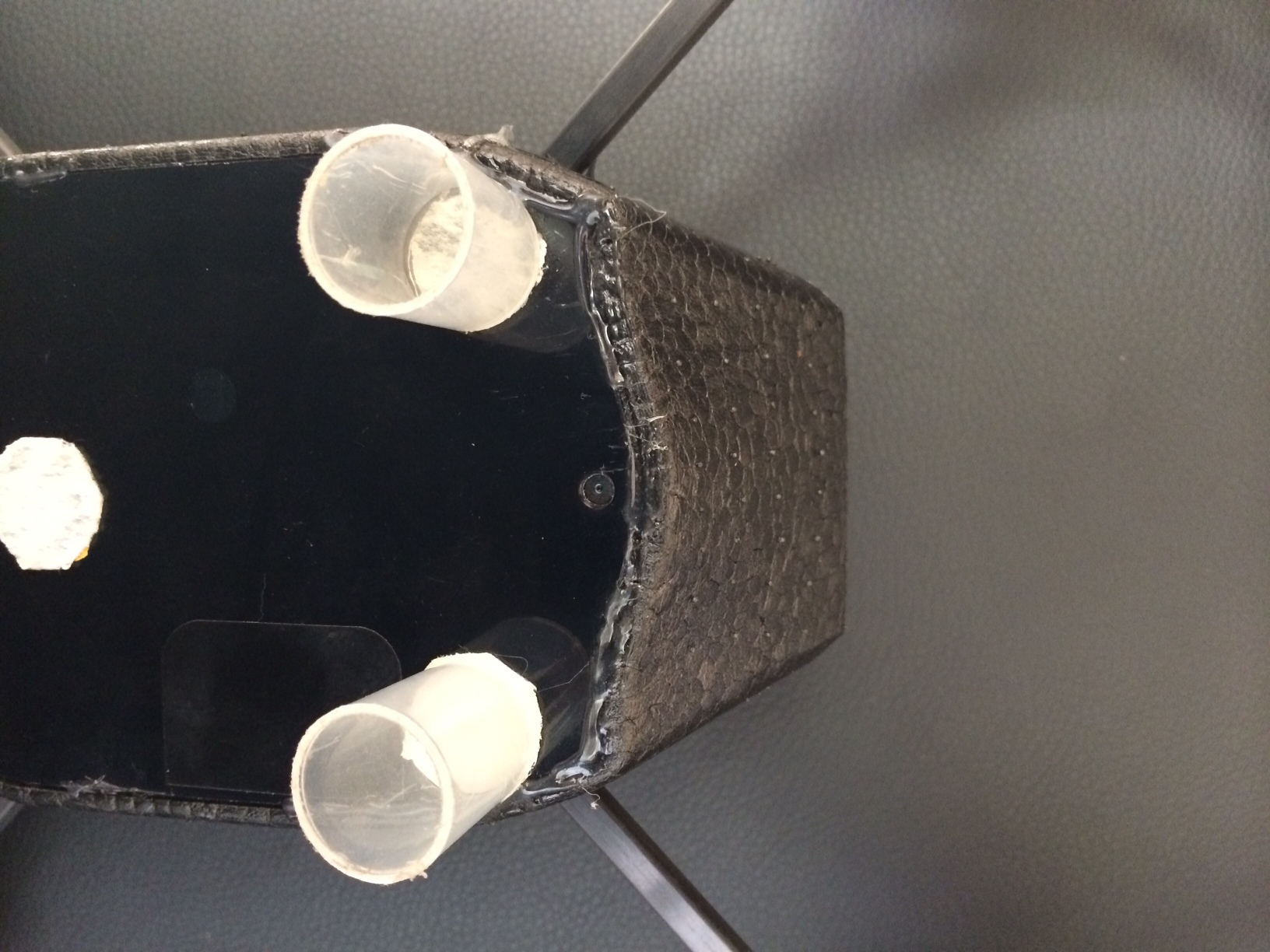
Дно квадрокоптера защищено тонкой крышкой, которая может слегка отклеиться и закрыть собой нижнюю камеру. Аппарат начинает думать, что под ним — препятствие, и пытаться его обойти, вытворяя полнейший ад, стучась об стены, людей и пугая несчастных котиков.
Кстати, эти две огромные белые штуки – колпачки от бутылки с жидкостью для очистки маркерных досок, после потери одной из опор пришлось придумывать что-то очень быстро. Двусторонний скотч и смекалка спасли ситуацию.
13. Шум
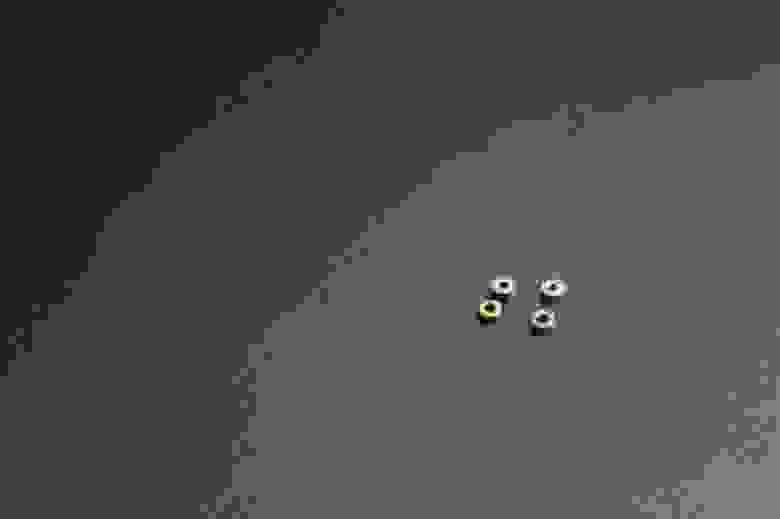
В отличие от больших дронов, между двигателем и пропеллеров есть шестеренки, втулки и вал, а смазать их нельзя по объективным причинам. Втулка была заменена на подшипник, чтобы уменьшить уровень шума. Но после приземления в траву или на грязную дорогу шестеренки встанут, так как на смазку просто налипнет пыль. Приходится просто мириться с шумом.

На фотографии желтые – родные медные втулки, а стальные – специально заказанные мной микроподшипники. Не уверен, что этот мод объективно снизил шум, но впечатления от работы несколько улучшились.
В ходе подготовки этого поста мы планировали снять крутое видео с красивыми полетами Ar.Drone в ограниченном пространстве. Но случилось страшное: дрон стал вести себя неадекватно – вначале он атаковал нашего милого оператора, налетев со спины, а позже целился и в припаркованные неподалеку автомобили. Полеты пришлось свернуть, а видео собрать из того, что получилось.
Небольшой бонус: краш-тест блондинки глазами квадрокоптера
После этой аварии дрон начал сходить с ума, например этот цирковой номер он исполнил совершенно произвольно и без команды оператора.
Несмотря на все описанные истории, мне очень понравился Ar.Drone. Это очень крутая игрушка за свои деньги, которая требует ухода и обслуживания. Очередная авария только разжигает интерес, а впечатления от полета – незабываемы. Я однозначно снова отремонтирую свой дрон и до наступления зимы еще не раз планирую полетать. А так же постараюсь исправить существующие проблемы, но об этом я планирую рассказать в другой раз.








