Осень, грусть, ностальгия. Самое время развеяться, устроить себе образовательный квест, полетев на Марс. Виртуально, конечно, в Orbiter'е. А чтобы было интересней, тормозить у Марса мы будем не двигателями, а трением об атмосферу.
План полёта
Для наибольшей понятности и удобства, наш полёт будет разбит на простые этапы:
- Старт с Земли.
- Совмещещение плоскостей орбит.
- Разгон к Марсу.
- Коррекции траектории на пути к Марсу.
- Коридор входа.
- Торможение в атмосфере.
- Подготовка к посадке.
- Полёт в атмосфере и посадка
Подготовка к полёту
Кроме самого Orbiter'а нам потребуется только AerobrakeMFD (архив просто распаковать в папку установленного симулятора).
Используемые определения
Если вы не читали предыдущие публикации серии, стоит развернуть.
Апоцентр — самая высокая точка орбиты. Для орбиты вокруг Земли также используется название «апогей».
Перицентр — самая низкая точка орбиты. Для орбиты вокруг Земли также используется название «перигей».
Наклонение орбиты — угол между плоскостью орбиты и другой плоскостью (плоскостью, проходящей через экватор Земли или плоскостью орбиты другого тела)
Восходящий узел — точка, в которой орбита пересекает плоскость экватора Земли или плоскость орбиты другого тела, оказываясь «выше» неё. «Выше» и «ниже» определяются условными северным и южным полюсами.
Нисходящий узел — точка, в которой орбита пересекает плоскость экватора Земли или плоскость орбиты другого тела, оказываясь «ниже» неё. «Выше» и «ниже» определяются условными северным и южным полюсами.
Например, если мы говорим об орбите Луны вокруг Земли, картинка будет следующей:

Перицентр — самая низкая точка орбиты. Для орбиты вокруг Земли также используется название «перигей».
Наклонение орбиты — угол между плоскостью орбиты и другой плоскостью (плоскостью, проходящей через экватор Земли или плоскостью орбиты другого тела)
Восходящий узел — точка, в которой орбита пересекает плоскость экватора Земли или плоскость орбиты другого тела, оказываясь «выше» неё. «Выше» и «ниже» определяются условными северным и южным полюсами.
Нисходящий узел — точка, в которой орбита пересекает плоскость экватора Земли или плоскость орбиты другого тела, оказываясь «ниже» неё. «Выше» и «ниже» определяются условными северным и южным полюсами.
Например, если мы говорим об орбите Луны вокруг Земли, картинка будет следующей:

Этап 1. Старт с Земли
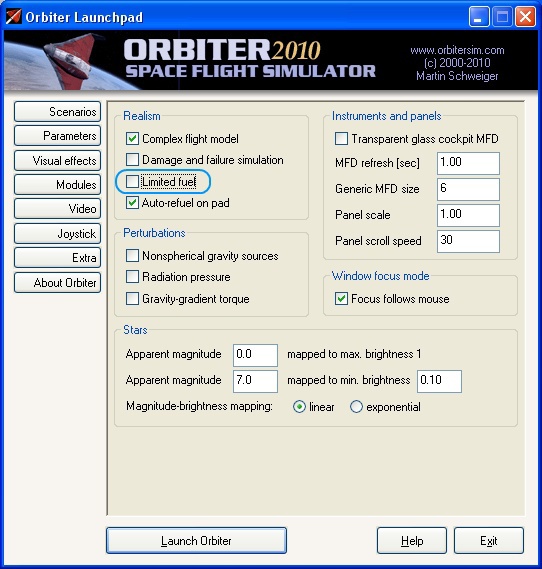
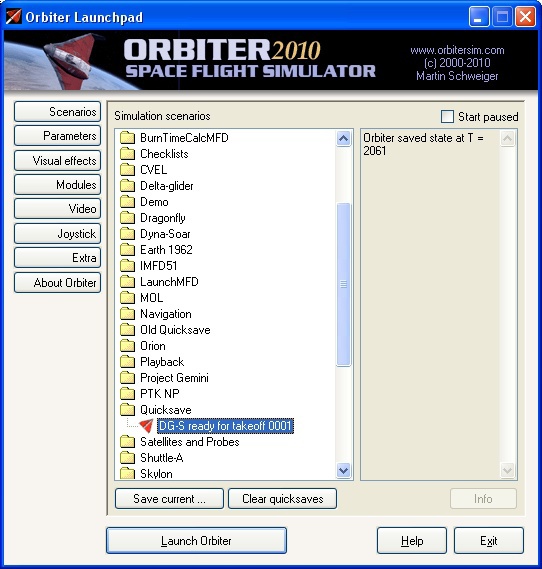
Первым делом необходимо включить в разделе «Параметры» режим «бесконечного топлива», сняв галочку:
Нужный нам сценарий — «DG-S ready for takeoff» в папке Delta-glider. В нем наш корабль уже стоит на взлетно-посадочной полосе на мысе Канаверал, готовый к взлету.

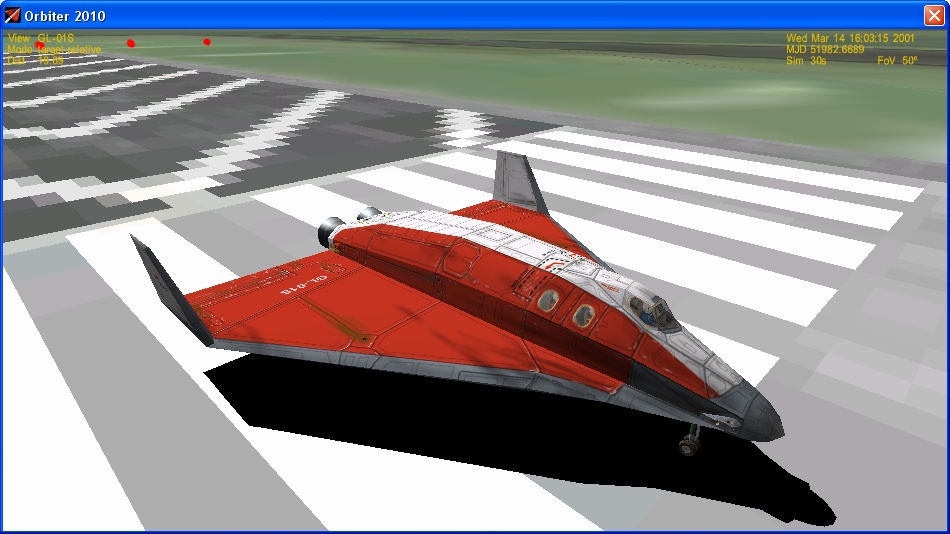
Дельта-глайдер — рабочая лошадка Orbiter'а
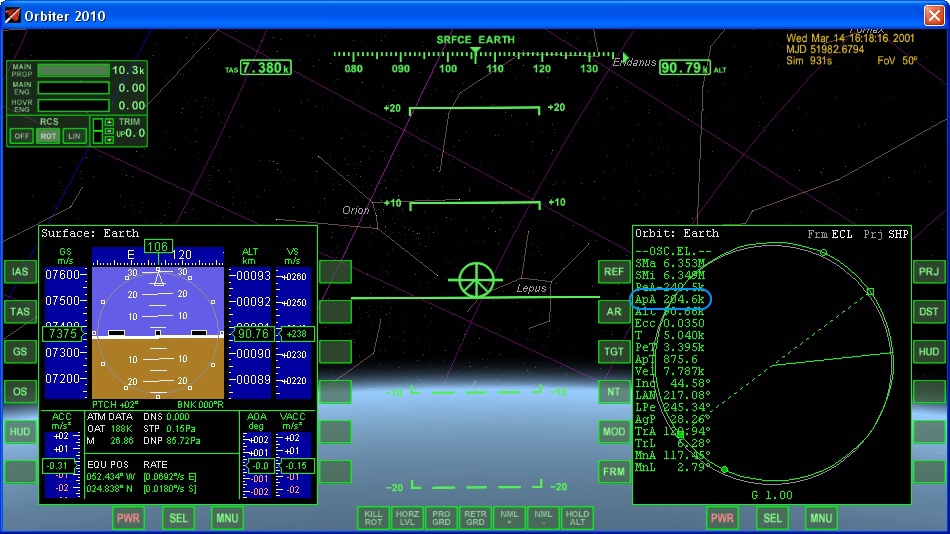
Нажав F1 перейдем в режим «вид из кабины». Нажимая F8 переключим вид в режим «стеклянного кокпита».
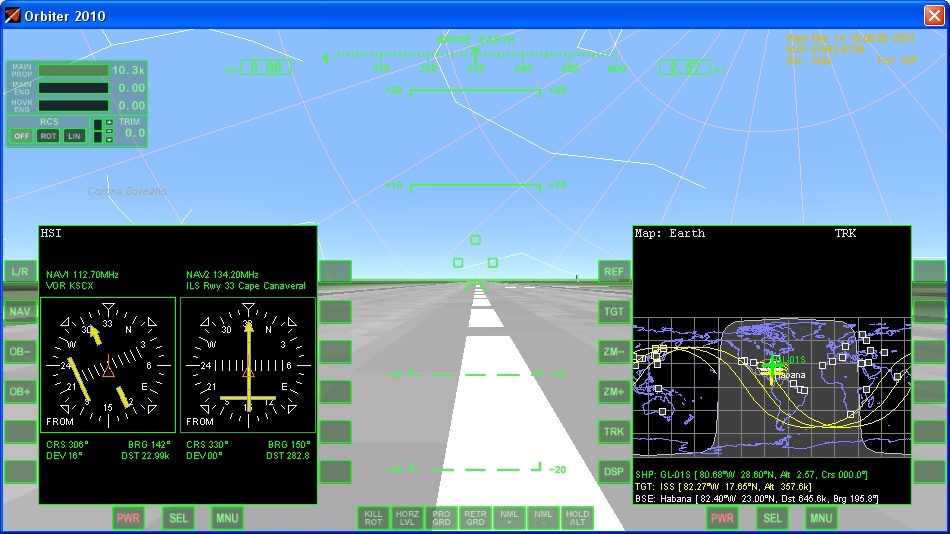
Слева и справа расположены многофункциональные дисплеи (МФД, MFD). На эти дисплеи мы будем выводить различные приборы, которые будут нужны нам в полёте. Горячие клавиши работы с МФД используются с предварительно нажатым левым и правым Shift для левого и правого МФД соответственно. Меню выбора МФД вызывается нажатием Shift-F1 либо кликом мышки на кнопке MNU под МФД. Кокпит интерактивный, если вам лень запоминать горячие клавиши, можно нажимать кнопки кликами мыши. Переключим левый МФД в режим «Поверхность» нажатием Shift — F1, Shift — S, а правый в режим «Орбита» нажатием Shift — O. Для удобства отображения сменим режим проекции на правом МФД с эклиптической на корабельную нажатием Shift — P (МФД заменит ECL на SHP в своей правой верхней части) и сменим режим отсчета высоты с центра небесного тела на высоту от поверхности комбинацией Shift — D (МФД заменит расстояние перицентра и апоцентра PeR и ApR на высоты перицентра и апоцентра PeA и ApA).
Рекомендую запомнить одну комбинацию клавиш — Ctrl — P. По ней вы всегда сможете поставить симулятор на паузу.
Второй очень полезный набор горячих клавиш управляет временем — R — замедляет время в 10 раз, T — ускоряет в 10 раз.
Перед взлётом необходимо ещё включить двигатели системы ориентации (Ctrl — / на цифровой клавиатуре) и установить триммер до упора вверх, удерживая кнопку Delete над блоком курсорных клавиш.
Включаем и фиксируем маршевые двигатели (нажать Num +, затем Ctrl, отпустить Num +, отпустить Ctrl). Начинаем разбег. При правильно установленном триммере корабль начнет отрываться от полосы самостоятельно:

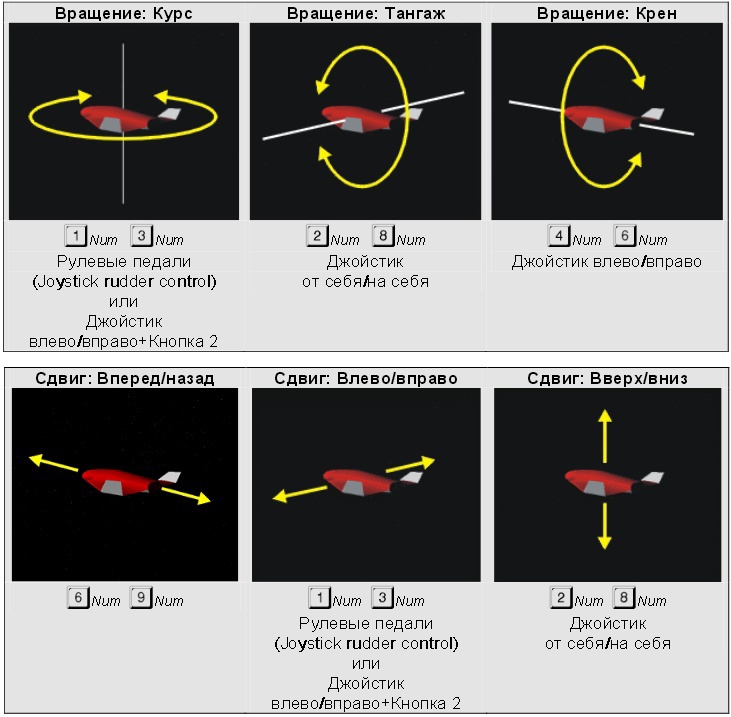
Убираем шасси (кнопка G) и, управляя с цифрового блока клавиатуры, разворачиваем корабль на курс 90°. Управляя триммером (Insert вниз, Delete вверх) и режимом остановки вращения KillRot (Num 5) начинаем разгон, выдерживая угол тангажа 20-30°.

Начиная с высоты ~30 км триммеры и режим KillRot перестанут справляться. Можно не вмешиваться в управление (в этом случае будут участки небольшого снижения), можно переключиться в режим 2D кокпита (нажимая F8) и менять вектор тяги маршевых двигателей, выйти на орбиту это не помешает. Разгоняемся до тех пор, пока апоцентр орбиты не достигнет 200 км.
Выключаем маршевый двигатель кнопкой Num *. Занимаем положение по вектору орбитальной скорости (режим PROGRD [) и ждём апоцентра. В районе апоцентра снова включаем маршевый двигатель и поднимаем перицентр до ~200 км.

Итак, мы на круговой опорной орбите ~200 км. Для удобства дальнейшего полёта откроем створки тормозных двигателей (Ctrl — Пробел, Retro Doors — Open). Переведем индикатор на лобовом стекле (ИЛС) в орбитальный режим нажатием кнопки H.
Этап 1 успешно выполнен. Сохранимся нажатием Ctlr-S. Сохраненная игра будет лежать в папке Quicksave и её можно будет загрузить совершенно так же, как и сценарий в начале:
Не знаю, как вам, а мне кажется, что пси-эмбиент отлично подходит к таким полетам:
Этап 2. Совмещение плоскостей орбит
Для того, чтобы мы могли нормально разгоняться к Марсу, необходимо совместить плоскость нашей орбиты с плоскостью орбиты Марса. Для этого нам нужен МФД «Совмещение плоскостей орбит» (Shift — A). Выберем целью Марс (Shift — T, в меню выбрать Celestial Bodies — Mars):

Следующий узел восходящий (Ascend Node, AN), поэтому необходимо занять положение «вниз» от плоскости орбиты. Для этого есть режим NML- (кнопка ' или клик на кнопке NML- внизу экрана). Дождемся точки, в которой время до узла (Tn на МФД) будет составлять примерно половину от времени маневра в узле (Est Thrust T), и включим маршевый двигатель в ней:

Почему половина времени до узла? Дело в том, что при маневре линия узлов смещается, поэтому если начать коррекцию орбиты за время, равное времени маневра в узле, узел «уедет». Это же смещение линии узлов является критерием остановки двигателя. Когда линия узлов почти перпендикулярна зеленой линии дальнейшая коррекция смысла не имеет.

Благодаря этой простой формуле мы практически совместили плоскости орбит с одного маневра. Но стоит повторить маневр для максимального совмещения плоскостей:

Мы закончили второй этап. Не забудьте сохраниться.
Этап 3. Разгон к Марсу
Для подготовки маневра включим МФД «Переход» (Shift — X). Наша цель — Марс, который обращается вокруг Солнца, поэтому в качестве центрального тела укажем Солнце (Shift — R, выбрать Sun в меню). Мы обращаемся вокруг Земли, поэтому укажем Землю как исходное тело (Shift — S, выбрать Earth в меню). Выберем Марс целью (Shift — T, выбрать Mars в меню). МФД будет выглядеть так (добавлены пояснения для понятности):

Включим режим планирования маневра (кнопка HTO на МФД). Появится пунктирный радиус точки начала маневра. Его можно перемещать нажатиями Shift — < и >. Планируемый импульс регулируется кнопками Shift — - и +. Прицелимся по Марсу:
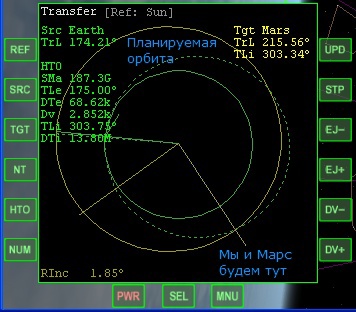
Обратите внимание, что точка перехвата Марса находится не на противоположной стороне орбиты. Это значит, что наша траектория не будет Гомановской, мы потратим больше топлива, но зато долетим быстрее.
МФД пишет, что нам надо разогнаться на 2,8 км/с. Наша текущая орбитальная скорость 7,6 км/с. Вроде бы все просто: 7,6+2,8=10,4 км/с. Но это неверно! Наш корабль находится на орбите Земли. А Земля в свою очередь вращается вокруг Солнца. Получается такая интересная картинка:

2,8 км/с, которые нам предлагает МФД, надо добавлять к орбитальной скорости Земли, а не нас. Ситуацию ещё сильнее усложняют следующие факторы:
- Для того, чтобы покинуть орбиту Земли надо разогнаться до второй космической скорости (11,2 км/с).
- Орбитальная скорость нелинейно зависит от высоты орбиты.
- При удалении от Земли наша скорость будет падать из-за перехода кинетической энергии в потенциальную.
- Разгон производится не мгновенно, за время разгона часть скорости уже будет потеряна на переход в потенциальную энергию.
В принципе, есть специальные МФД для расчета нужной скорости, но у них достаточно высокий порог вхождения. Поэтому мы разрубим этот Гордиев узел очень просто: разгонимся до второй космической скорости, добавив к ней «на глазок» 500-1000 м/с, а, уже удалившись от Земли, произведем коррекцию траектории. Начинаем разгон на ночной стороне орбиты, чтобы наша орбитальная скорость добавилась к орбитальной скорости Земли:

Отслеживаем параметры орбиты на правом МФД «Орбита»:

Есть вторая космическая! Обратите внимание на то, что скорость таки не 11,2 км/с. Прекратим разгон при скорости в районе 11,5 км/с, чтобы не разогнаться слишком сильно.

Стабилизируем корабль в пространстве, включив режим KillRot. Ускоряя время проматываем его до того момента, когда гравитационное воздействие Земли практически сойдет на нет. Выберем себя в качестве исходного тела (Shift — S, набрать в текстовом поле наше имя GL-01S). Неплохо разогнались:
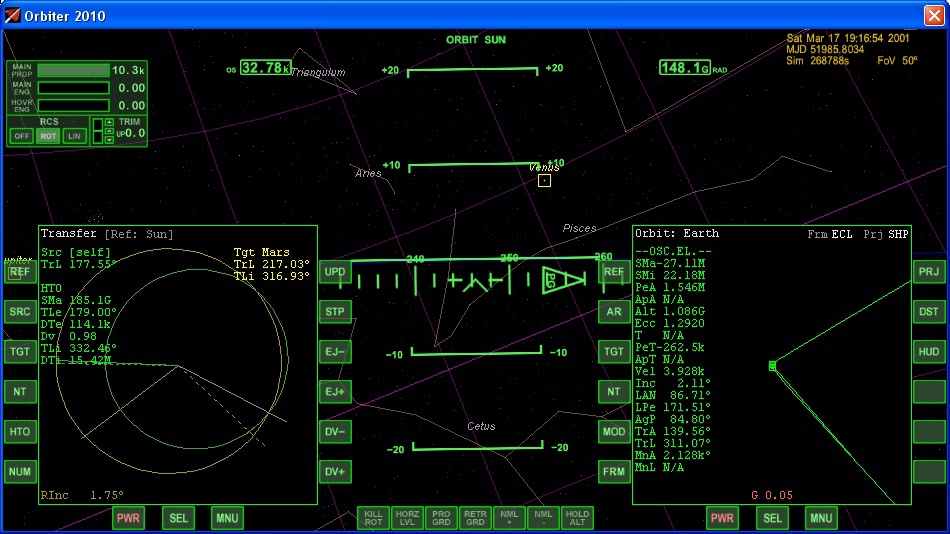
Теперь наша задача — скорректировать орбиту так, чтобы мы прицелились примерно в точку встречи с Марсом. Визуально это можно представить так:
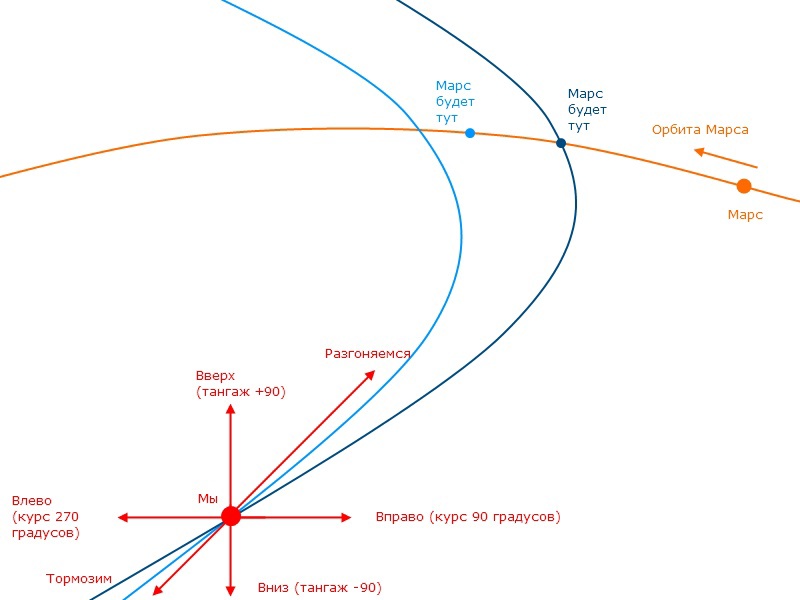
В точном прицеливании нам поможет МФД синхронизации орбиты (Shift — Y, выбрать Марс как цель по Shift — T). Наша задача — импульсами вправо, влево, вверх, вниз, вперед, назад, уменьшать значение параметра DTmin:

Здравый смысл подсказывает, что при коррекции стоит давать импульсы направо. Занимаем положение 90° вправо и, удерживая его вручную (автоматического режима нет), включаем маршевый двигатель. Заметно уменьшение DTmin:

Алгоритм дальнейших действий прост. Когда DTmin перестает уменьшаться, не достигнув околонулевого значения, меняем ось — проверяем, уменьшит ли его смещение вверх/вниз или вперед/назад. Если мы хорошо совместили орбиты на этапе 2 такого, скорее всего, не будет. Результат правильных действий:

Этап 3 завершен. Не забудьте сохраниться.
Этап 4. Коррекции траектории на пути к Марсу
Марс — относительно легкая планета. Это не Юпитер, который не требовал промежуточных коррекций при полёте. Поэтому мы несколько раз будем корректировать нашу траекторию, чтобы не пролететь мимо. Первым шагом будет полное совмещение плоскостей орбит и первая коррекция траектории. Если вы посмотрите на МФД синхронизации орбиты, он показывает угол плоскостей орбит почти в два градуса. Его надо обязательно исправить, потому что МФД не может нормально работать в таких условиях. Поэтому переключаем левый МФД в режим совмещения плоскостей орбит. Он «помнит» предыдущее тело обращения — Землю, поэтому надо переключить его на Солнце (Shift — R, выбрать Sun в меню). Следующий узел восходящий, до него почти пять мегасекунд (невольно вспоминается «Глубина в небе» Винджа, где время измеряли такими единицами):

Совмещаем плоскости орбит:

Затем уменьшаем DTmin. Рекомендую менять его разгоняясь/тормозя, и ни в коем случае не смещаться вверх/вниз — плоскости орбит мы уже совместили. Когда DTmin будет близок к нулю, небольшие смещения лучше выполнять не маршевыми, а маневровыми двигателями:
После точного прицеливания DTmin будет почти равен нулю:

До точки встречи 9,5 мегасекунд. Предлагаю производить коррекции методом дихотомии — за пять, две с половиной и одну мегасекунду.



Этап 4 считаем закончившимся за 1 мегасекунду от точки встречи. Не забудьте сохраниться.
Этап 5. Коридор входа.
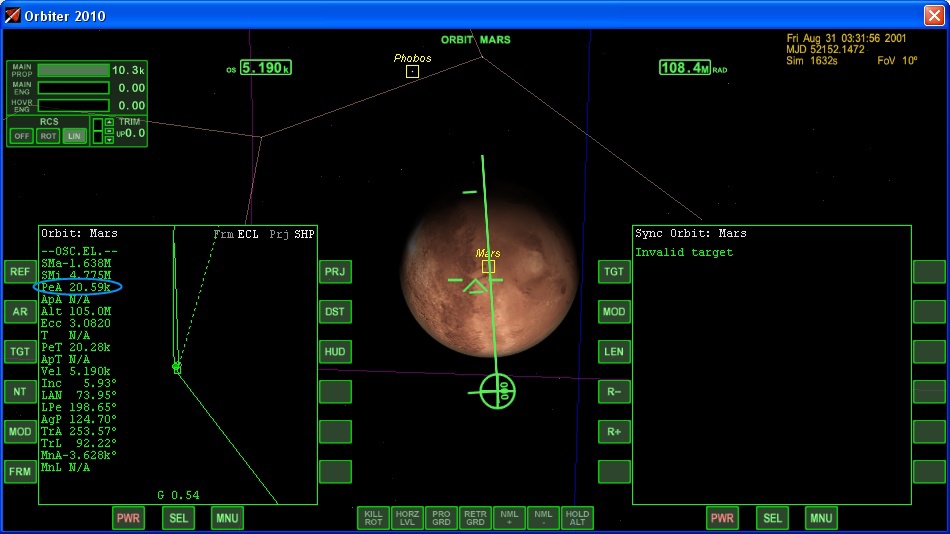
Что такое «коридор входа»? Нам нужно подойти к Марсу так, чтобы, с одной стороны, не врезаться в него, а с другой стороны — не пролететь мимо. Наша цель — перицентр 20 км, чтобы мы надежно вошли в атмосферу и могли тормозить. Переключим левый МФД в режим «Орбита» (Shift — O) и выберем в качестве тела обращения Марс (Shift — T, выбрать Марс в меню). Промотаем время до тех пор, пока гравитация Марса не начнет ощущаться (20-30 килосекунд до точки встречи):

Апоцентр отрицательный, мы должны будем врезаться в Марс. Нужно поднять апоцентр до 20 км. Для этого развернемся носом к планете, увеличим Марс (кнопка Z уменьшает поле зрения, кнопка X — увеличивает).

Я выбираю торможение на дневной стороне. Ночью в условиях дефицита времени можно потерять ориентацию в пространстве, что потенциально опасно.
Перицентр 20 км. Этап 5 завершен. Обязательно сохранитесь!
Этап 6. Торможение в атмосфере
Установим на правом МФД режим «Поверхность», вернем нормальное поле зрения, развернем корабль по направлению движения и морально приготовимся к трудному этапу.

Нашими основными органами управления будут триммер, которым мы уже пользовались на взлете с Земли, и аэродинамические тормоза (выпускаются и убираются нажатием Ctrl — B). Установим триммер до упора вверх и выпустим тормоза. Переключим ИЛС в режим «поверхность» нажатием H и займем положение с креном 90°:
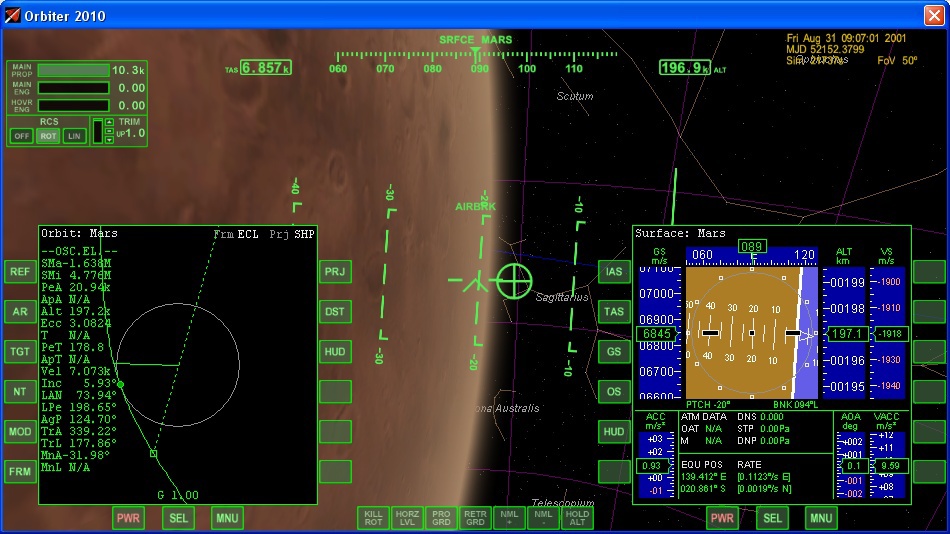
Достигнув перицентра, управляем креном так, чтобы держать околонулевую вертикальную скорость и продолжать торможение:

При высоте апоцентра ниже 1000 км убираем воздушные тормоза и начинаем выбираться из атмосферы:

По достижении апоцентра поднимаем перицентр выше 100 км:

Всё, мы на устойчивой орбите вокруг Марса. Обязательно сохранитесь.
В теории можно построить заход так, чтобы зайти на посадку сразу с этого этапа. Но это, во-первых, сложно, а во-вторых, требует очень быстрой работы с несколькими МФД параллельно пилотированию корабля, что повышает шансы на ошибку. Я предпочёл пойти более длинным, но простым и безопасным путём.
Исторически аэроторможение использовалось марсианскими аппаратами. Например, аппарат MRO на аэродинамическом торможении сэкономил примерно половину топлива, которое бы потребовалось для обычного торможения. Конечно же, аппарат тормозил не так по-гусарски, как мы. MRO снижал высоту апоцентра постепенно, многократно тормозя в верхних слоях атмосферы.
Этап 7. Подготовка к посадке
Наша цель — база Olympus, которая, как следует из названия, расположена недалеко от Олимпа, самой высокой горы на Марсе и второй по высоте в Солнечной системе:

Этот этап состоит из нескольких частей.
Подготовка МФД карты. Откроем МФД карты (Shift — M) и выберем нашей целью марсианскую базу Olympus (Shift — T, выбрать Spaceports — Olympus).
Подготовка МФД Aerobrake. Откроем МФД (Shift — E), установим целью базу Olympus (Shift — T, ввести Olympus с клавиатуры), переключим МФД в режим карты нажатиями кнопок PG и PRJ.

Подготовка МФД связи. Откроем МФД (Shift — C). Откроем меню с данными радиомаяков (Ctlr — I). База Olympus имеет три посадочные площадки (увы, никаких взлетно-посадочных полос), первая из которых имеет маяк, работающий на частоте 129.70 МГц. Установим эту частоту в МФД нажатиями кнопок МФД <, <<, >, >>.

Затем нужно спланировать посадку. Наше ненулевое наклонение орбиты означает, что наша траектория будет смещаться по поверхности. Также сейчас база «Олимп» находится на ночной стороне. Поэтому, находясь на орбите, ждем совпадения двух факторов — база на дневной стороне и наша траектория проходит рядом с ней. При необходимости можно немного изменить наклонение орбиты. В моём случае ждать пришлось недолго, витков десять:

Когда до базы останется 4-5 тысяч километров, выполняем маневр торможения так, чтобы до базы оставалось тысяча-две километров недолёта и ориентируем корабль носом вперед:

Этап закончен, обязательно сохранитесь!
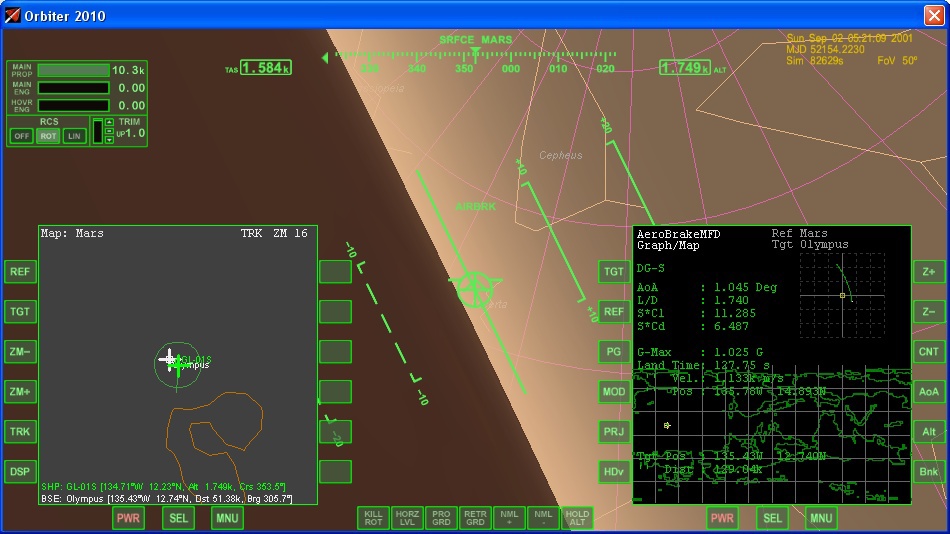
Этап 7. Полёт в атмосфере и посадка
МФД карты можно перевести в режим центрирования на корабле (кнопка TRK на МФД). Нашими главными органами управления опять будут триммер и аэродинамические тормоза. Управляя ими поддерживаем траекторию в район базы на Aerobrake MFD.

Продолжаем активное управление.

Проблема марсианской атмосферы в том, что она слишком слабая. Она не способна быстро и эффективно нас затормозить. Поэтому базу вы наверняка перелетите:
В этом нет ничего страшного. Из-за атмосферы мы, в любом случае, не сможем развернуться и тормозить маршевыми двигателями, как на Луне, поэтому остатки скорости придется сбрасывать в развороте. Следите за высотой — не воткнитесь в Марс. В развороте можно помогать себе подъемными двигателями (Num 0 увеличить тягу, Num . — уменьшить):

Разворачиваемся в сторону базы, до неё ещё ~50 км. Поддерживая корабль в воздухе подъемными двигателями продолжаем сближение

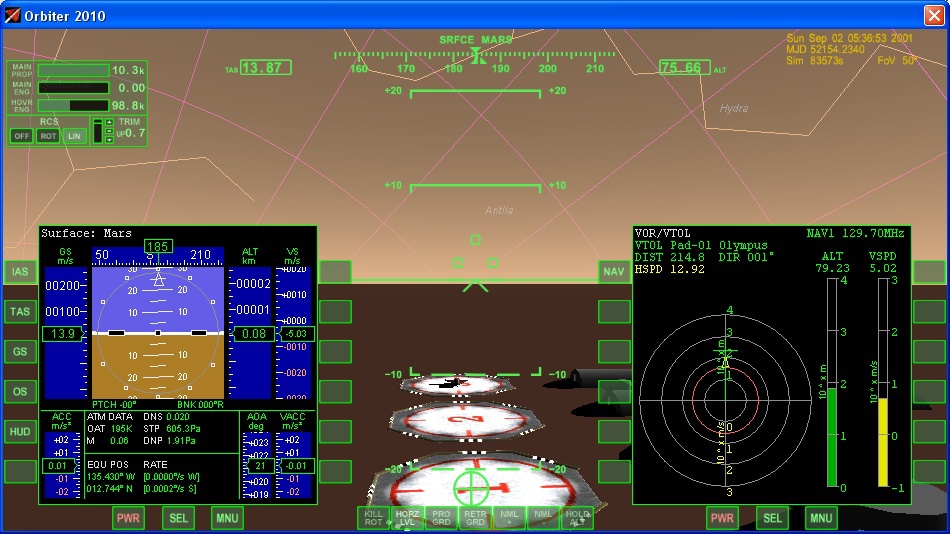
Включаем автоматический режим поддержания горизонтальной ориентации (L). Переключаемся на МФД посадки (Shift — L). Он хорош тем, что показывает направление и расстояние достаточно точно.
Тормозные двигатели очень слабые. Старайтесь придерживаться правила: горизонтальная скорость в сотнях метров в секунду не должна быть выше расстояния в десятках километров. В противном случае есть риск пролететь базу во второй раз:

Наша задача — окончательно остановиться, развернуться носом на базу и начать медленное сближение. Не забывайте следить за вертикальной скоростью!

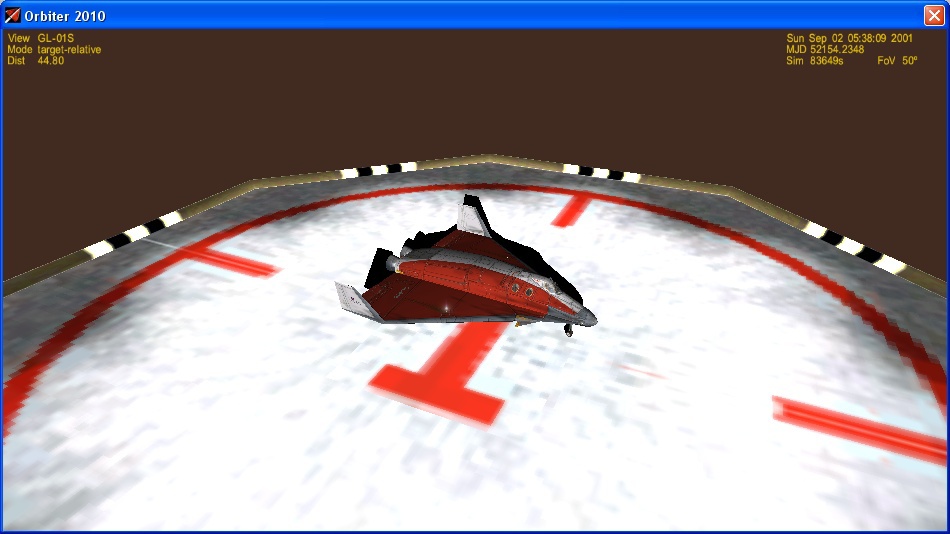
Выпускаем шасси, осталось немного:

Последние метры:
Есть посадка!
Вообще, посадка на Марс сложнее, чем на тело без атмосферы типа Луны. Атмосфера не позволяет занимать произвольное положение, приходится лететь носом вперед. А с другой стороны, её не хватает для полноценной работы крыльев.
Заключение
Не забудьте сохраниться. Вдруг захочется слетать на Фобос, или вернуться назад, на Землю?
Для любознательных есть переведенный на русский язык мануал. А ещё можно почитать другие посты серии Orbiter.








{kind=link}